Guide FPV
Vol alpin. Avant la descente.
Sommaire
I — PILOTAGE Fondamentaux. Lecture. Précision.
II — PRATIQUE EN MONTAGNE Choix. Cohérence. Pas de compromis.
III — SÉCURITÉ & PRÉPARATION Anticipation. Décision. Retour.
IV — ENGAGEMENT Tracer propre. Descendre vite.
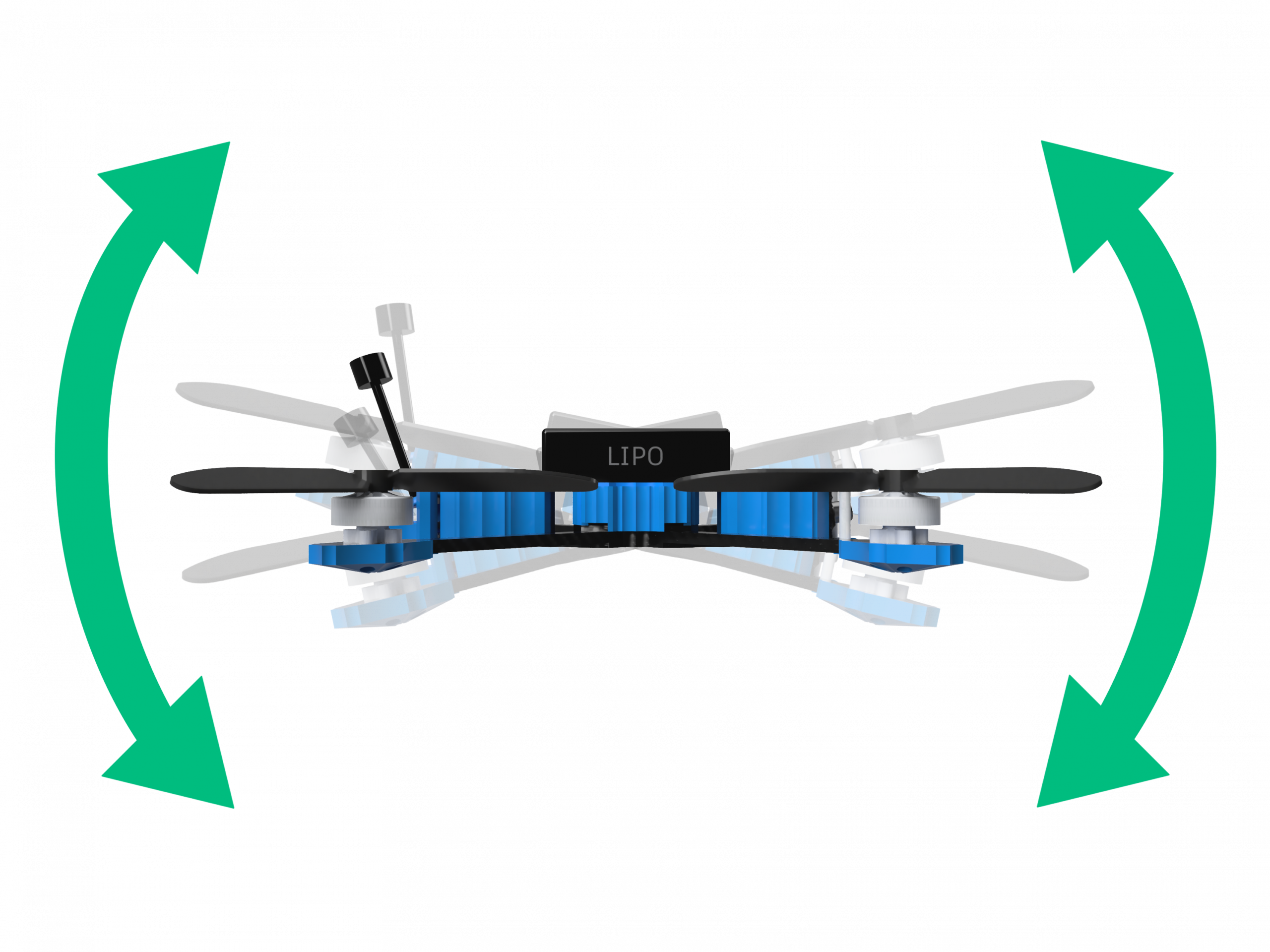
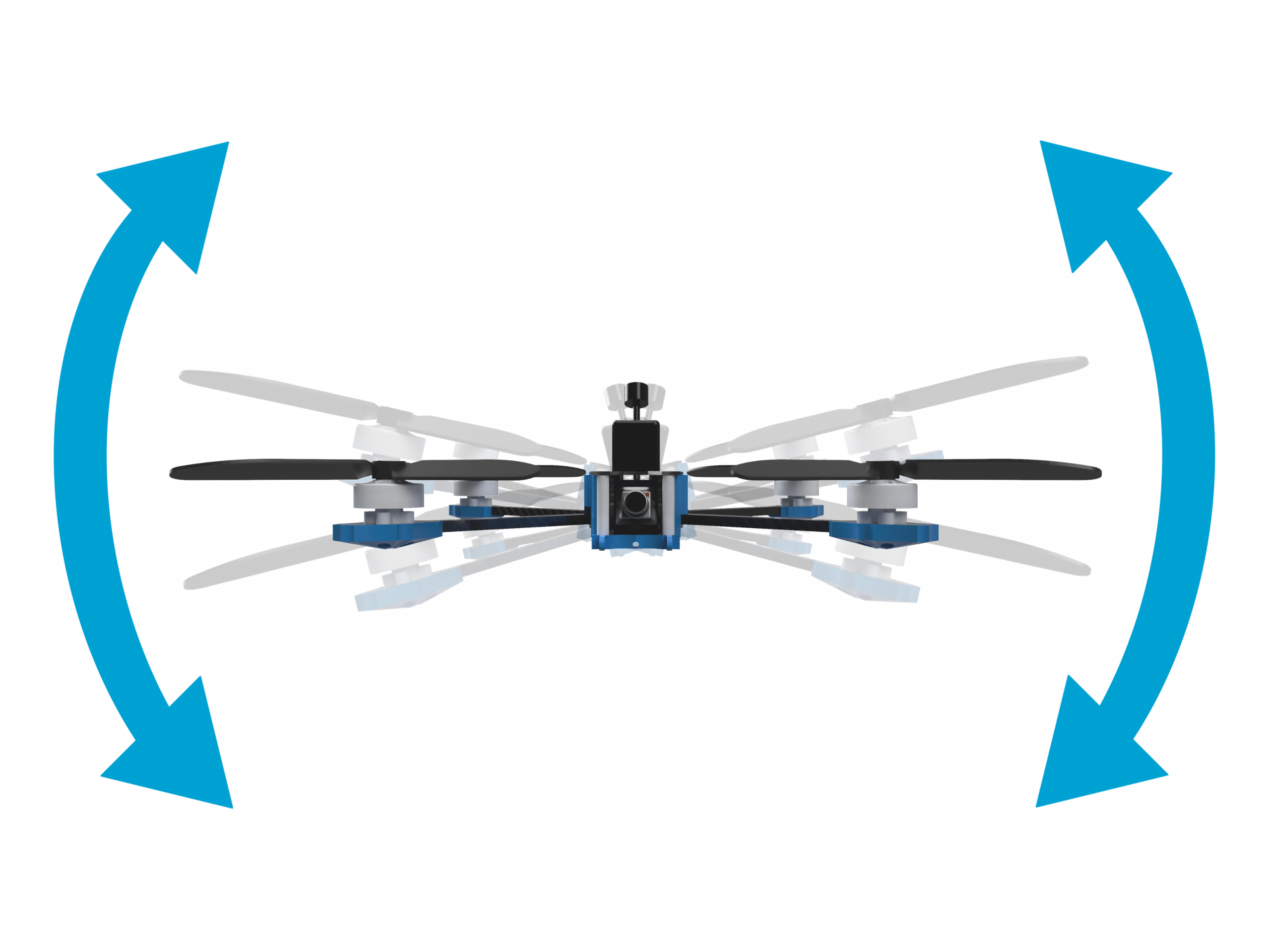
Axes et mouvements d'un drone FPV
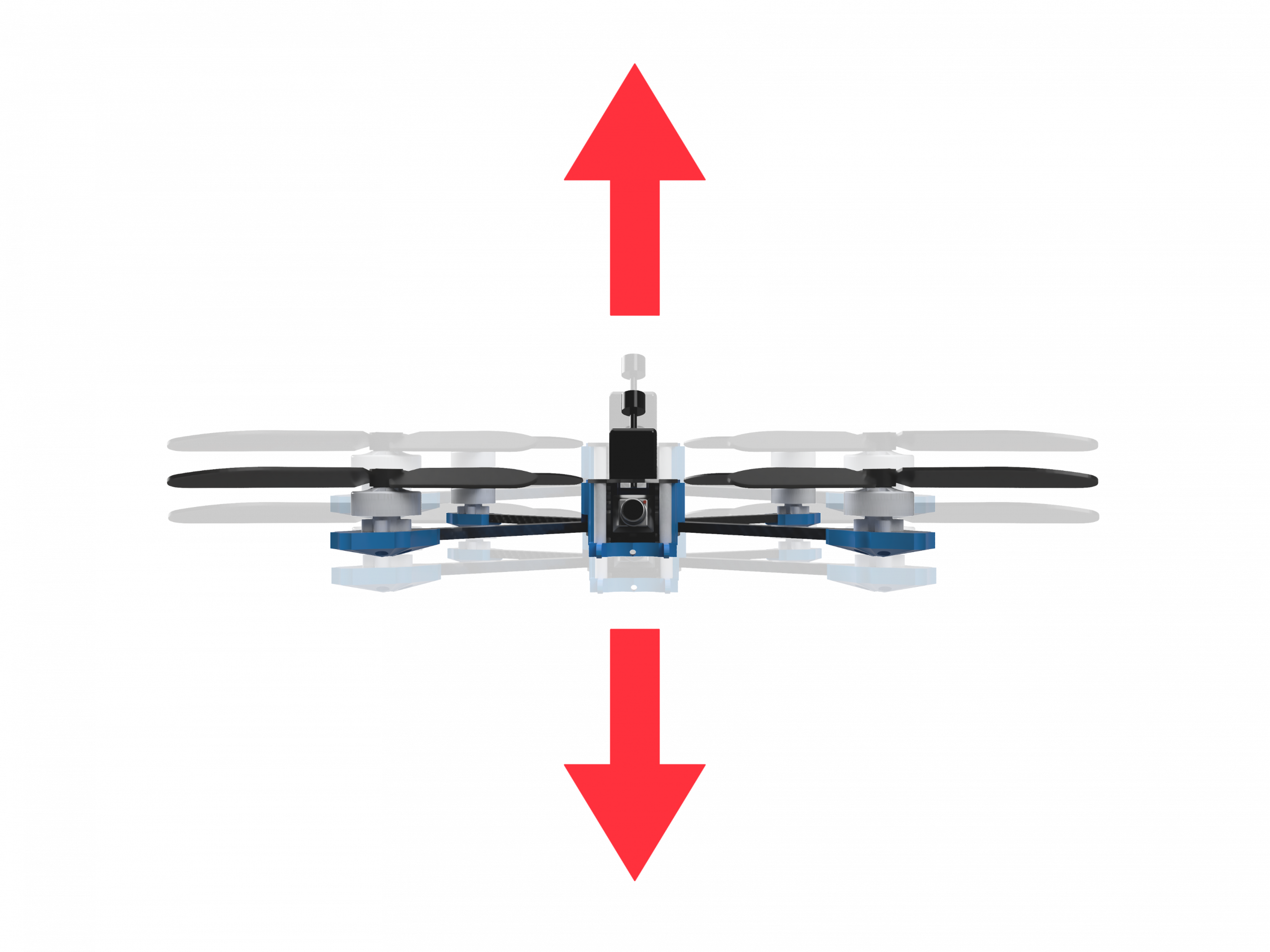
Les mouvements du drone se font selon trois axes : le roll, le pitch et le yaw. Le throttle (gaz) contrôle la puissance des moteurs et permet de monter ou descendre.
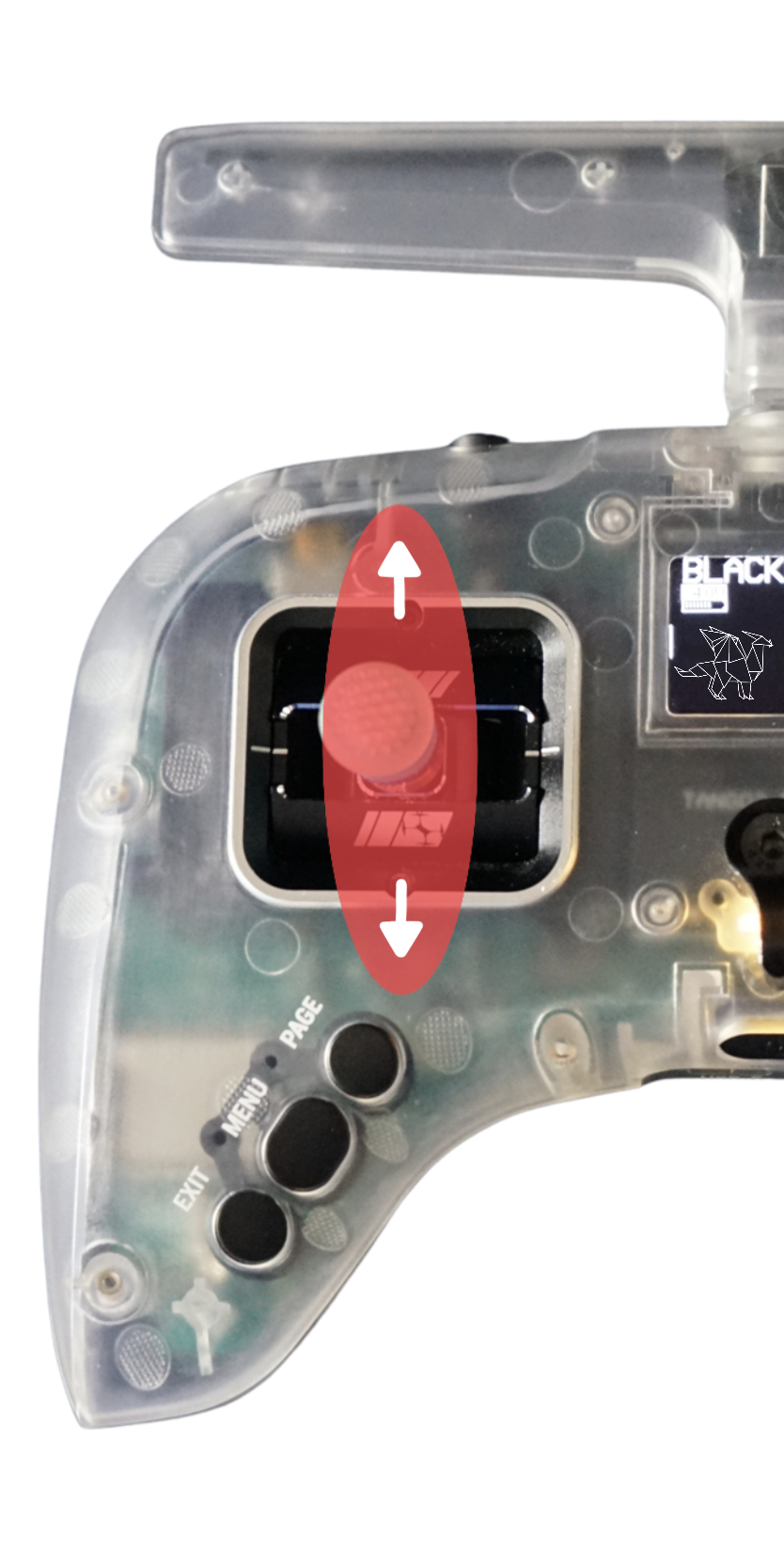
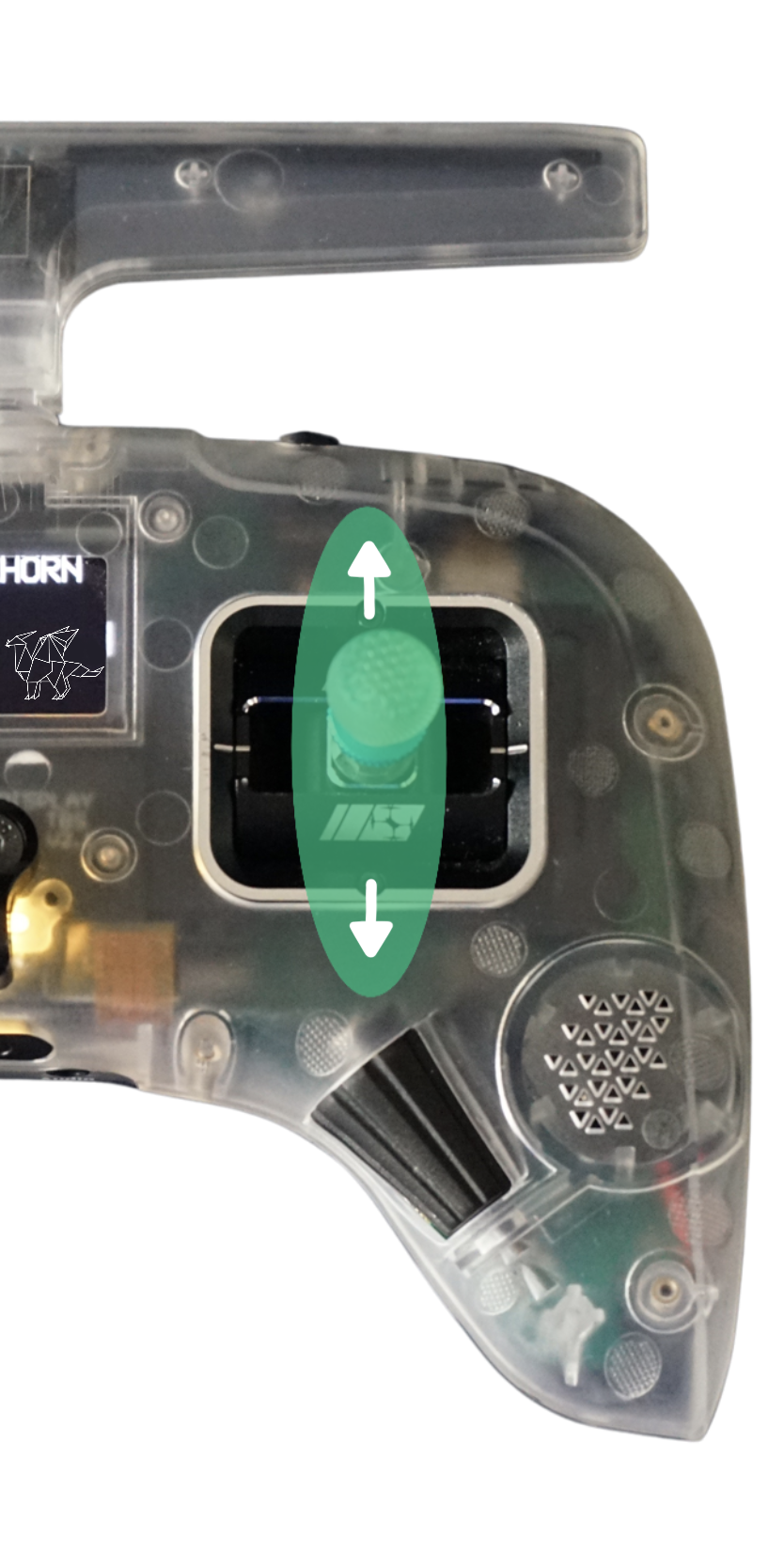
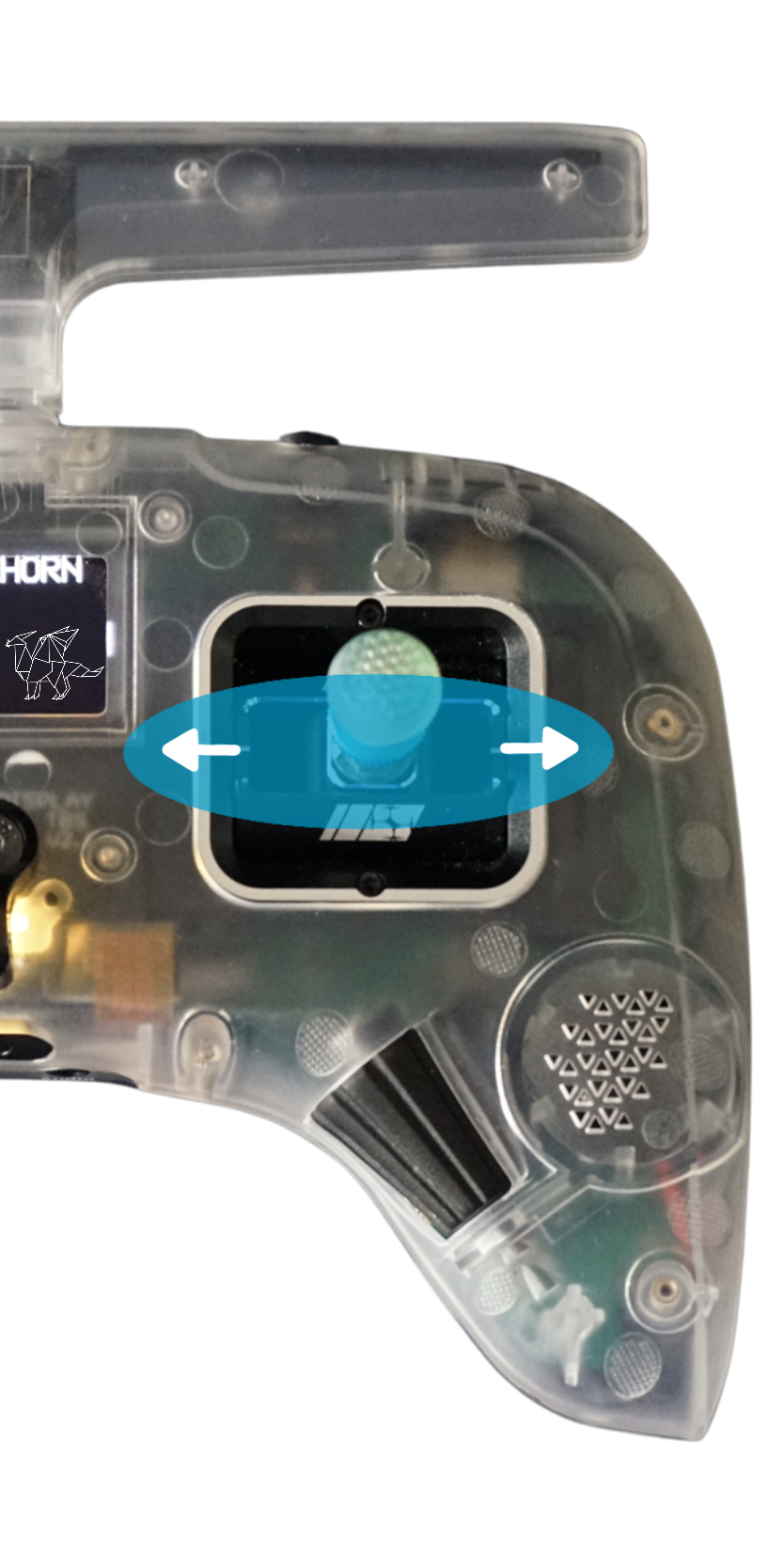
Axes et contrôle sur la radiocommande
En déplaçant les sticks de la radiocommande, vous contrôlez les mouvements du drone, comme la montée, la descente ou la rotation.

• Throttle (gaz) : contrôle la montée et la descente du drone.
• Yaw : permet de tourner le drone sur lui-même pour changer de direction.
• Roll : fait basculer le drone à gauche ou à droite.
• Pitch : incline le drone vers l'avant ou l'arrière.
Les modes 1, 2, 3 et 4 d'une radiocommande définissent la configuration des sticks. Mode 2 (gaz à gauche, c'est le plus utilisé). Mode 1 (gaz à droite), Mode 3 (inverse du Mode 2), et Mode 4 (inverse du Mode 1)
Throttle
Yaw

Pitch
Roll
L'OSD (On-Screen-Display)
L'OSD d'un drone FPV affiche les informations importantes directement sur l'écran du pilote. On peut y voir des données comme le niveau de batterie, le temps de vol, la vitesse ou l'altitude. Ces informations permettent au pilote de suivre facilement l'état de son drone sans quitter la vue en immersion.
• Distance et direction : point de décollage : indique à quelle distance et dans quelle direction se trouve le point de départ du drone.
• GPS Satellites : nombres de satellites connectés au drone.
• RSSI Valeur dBm : force du signal radio entre la radiocommande et le drone, mesurée en décibels (dBm).
• GPS Vitesse : vitesse du drone en km/h (ou mph), calculée via le GPS.
• Altitude : hauteur du drone par rapport au point de décollage, mesurée en mètres.
• G-Force : mesure des accélérations subies par le drone (forces gravitationnelles).
• Mode de vol : indique le mode activé (accro, stabilisé, angle, etc).
• Consommation ampèremétrique de la batterie : courant instantané consommé par le drone, mesuré en ampères (A).
• mAh de la batterie consommé : quantité d'énergie utilisée depuis de le décollage, mesurée en milliampères-heures (mAh).
• Tension moyenne d'une cellule : indique la tension moyenne de chaque cellule de la batterie, utile pour surveiller l'état de charge (4.2V = batterie pleine / 3.5V= batterie faible).
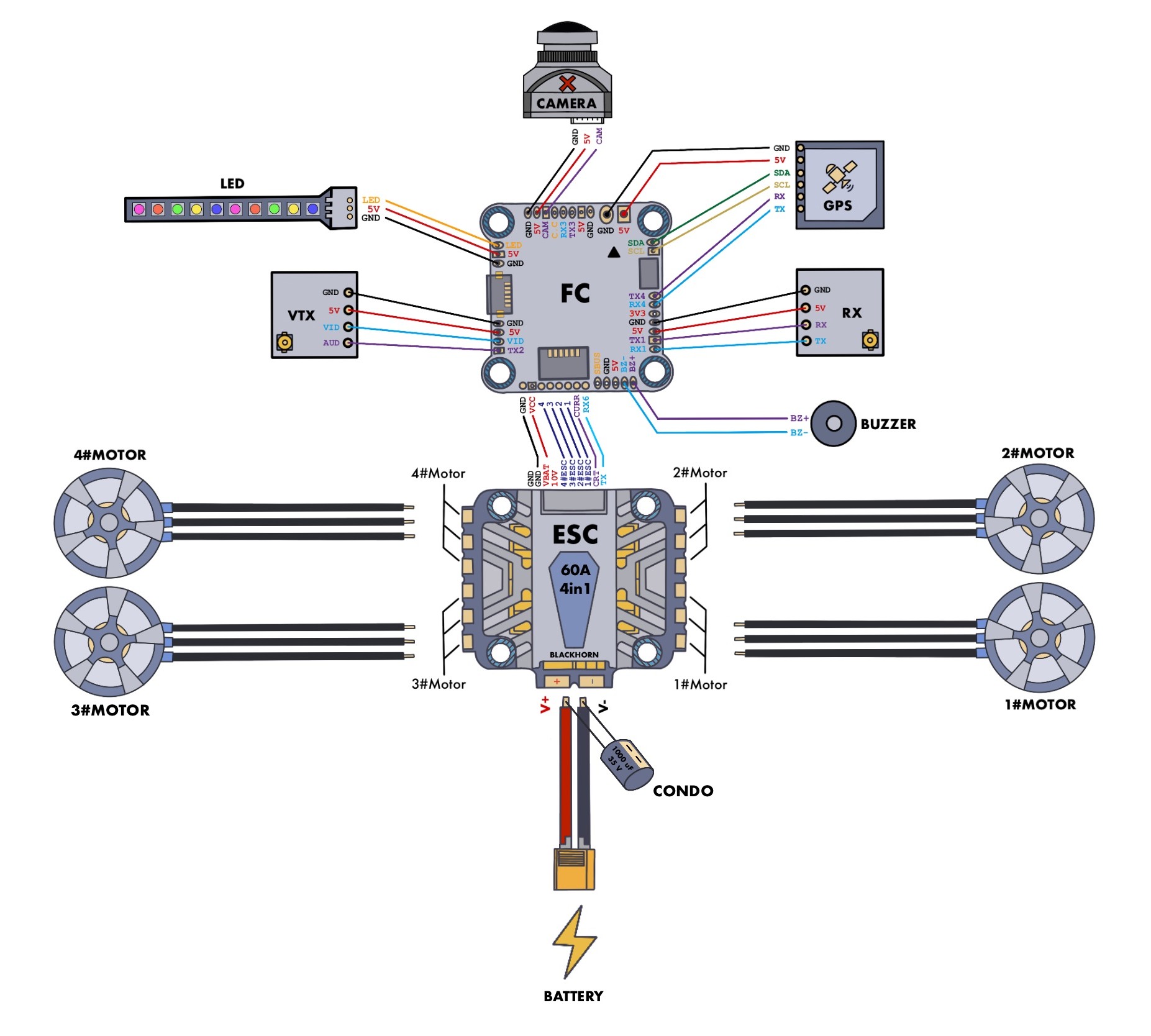
Montage électronique
La structure d'un drone FPV comprend un contrôleur de vol (FC), des moteurs, un contrôleur de vitesse électronique (ESC), une caméra, un émetteur vidéo (VTX), un émetteur radio (RX) et une batterie. Tous ces composants sont connectés pour assurer le pilotage et la transmission vidéo en temps réel.
L’un des principaux avantages d’un GPS dans un drone FPV est sa capacité à fournir une localisation précise en temps réel. En cas de perte de signal ou de batterie faible, le GPS peut être utilisé pour activer une fonction de retour automatique (RTH) qui ramène le drone à son point de départ en toute sécurité. Le GPS est connecté au contrôleur de vol du drone.
Le GPS contribue à améliorer la sécurité en permettant au pilote de surveiller en temps réel la distance parcourue, la vitesse et l’altitude du drone.
ESC (Electronic Speed Controllers)
Les ESC contrôlent la vitesse des moteurs d’un drone en ajustant la puissance électrique fournie à chaque moteur. Ils reçoivent des signaux du contrôleur de vol (FC) et les traduisent en variations de vitesse des moteurs. Cela permet au drone de changer de direction, de vitesse et d’altitude en réponse aux actions du pilote.
L’ampérage
Le chiffre le plus important est l’ampérage. Par exemple « 60A ». Le chiffre soixante représente la capacité de courant maximal que l’ESC peut gérer en continu sans risque de surchauffe ou de dommages. En d’autres termes, il indique que l’ESC peut fournir jusqu’à 60 ampères de courant électrique à chaque moteur du drone de manière stable et sécurisée.
La différence entre une ESC de 40A et une ESC de 60A réside dans leur capacité à gérer le courant électrique. Une ESC de 60A peut supporter un courant plus élevé que celle de 40A. Une ESC de 60A est mieux adaptée aux drones équipés de moteurs plus puissants ou de configurations de vol plus exigeantes, tandis qu’une ESC de 40A convient généralement aux drones plus légers ou aux applications moins exigeantes en termes de puissances. En résumé, choisir entre une ESC de 40A et une ESC de 60A dépend des besoins spécifiques de votre drone et de votre style de vol (Freestyle, Longrange, Race, etc…)
L’importance de la qualité des ESC
La qualité des ESC est essentielle pour des performances optimales. Des ESC bas de gamme peuvent entraîner des problèmes de réactivité, des performances médiocres et même des pannes en vol. Il est donc crucial d’investir dans des ESC de qualité supérieure pour garantir un vol stable, prévenir la surchauffe et éviter les pannes.
4in1
L’indication « 4in1 » sur un ESC signifie que quatre ESC individuels sont regroupés dans un seul module électronique. L’installation est plus propre et plus simple sur le drone, car il n’y qu’un seul composant à monter et à câbler.
Dimension de montage
20 x 20mm pour les drones de petites tailles.
30.5 x 30.5mm pour les drones 5 pouces et plus.
FC (Flight Controller)
Le contrôleur de Vol est un dispositif électronique qui agit comme le cerveau d’un drone FPV.
Les ESC reçoivent les commandes de la FC et contrôlent individuellement la vitesse des moteurs en fonction des informations fournies par les capteurs de la FC. Cette communication bidirectionnelle permet à la FC de réguler la puissance des moteurs en temps réel.
Il est connecté au RX (récepteur radio commande), au VTX (émetteur vidéo) et au GPS, assurant ainsi une intégration complète des systèmes essentiels du drone.
Composition des contrôleurs de vol
Les FC se composent généralement d’un microcontrôleur, de ports de communication, de gyroscopes, d’accéléromètres, de processeurs de signaux numériques (DSP) et de ports de sortie pour les ESC.
Dimension de montage
20 x 20mm pour les drones de petites tailles.
30.5 x 30.5mm pour les drones 5 pouces et plus.
▲ : Flèche qui définit l’orientation de la FC.
VTX (Video Transmitter)
Émetteur vidéo qui transmet en temps réel l’image capturée par la caméra du drone vers votre masque ou écran.
Un VTX est un petit dispositif électronique installé sur un drone FPV qui prend le signal vidéo de la caméra embarquée et le transmet via une fréquence radio spécifique vers le récepteur vidéo, généralement intégré dans des lunettes FPV ou un moniteur au sol. Le VTX est connecté au contrôleur de vol du drone.
Caractéristiques importantes des VTX
La puissance de sortie : Les VTX sont disponibles avec différentes puissances de sortie, mesurées en milliwatts (mW). Une puissance plus élevée permet une meilleure portée et une meilleure pénétration des obstacles, mais elle peut également être limitée par les réglementations locales.
Le nombre de canaux : Les VTX offrent généralement plusieurs canaux pour la transmission vidéo, ce qui permet aux pilotes de sélectionner une fréquence non utilisée pour éviter les interférences avec d’autres pilotes.
La fréquence : 1.2 GHz offre généralement une meilleure portée que 5.8 GHz. Cela est dû à la longueur d’onde plus longue 1.2 GHz, qui pénètre mieux les obstacles (comme les arbres, les bâtiments, etc.) et se disperse moins dans l’atmosphère. Si vous recherchez une transmission sur de longues distances ou dans des environnements avec beaucoup d’obstacles, 1.2 GHz est plus adapté. En revanche, 5.8 GHz est capable de transmettre des signaux vidéo de meilleure qualité en raison de la bande passante plus large disponible sur cette fréquence. Vous obtiendrez donc une transmission vidéo plus nette et plus fluide, avec moins de latence.
VTX analogique
- Transmission analogique de la vidéo.
- Utilisation de fréquences RF standard.
- Moins de bandes passante, ce qui peut entraîner des interférences et une qualité d’image inférieure.
- Compatible avec la plupart des lunettes FPV disponibles sur le marché.
- Coût souvent plus bas que les VTX numériques.
- Poids souvent plus léger que les VTX numériques.
VTX numérique (HD)
- Transmission numérique de la vidéo, offrant une meilleure qualité d’image.
- Utilisation de protocoles de transmission spécifiques, comme DJI FPV.
- Bande passante plus large, ce qui permet une meilleure résolution et moins d’interférences.
- Nécessite un équipement spécifique comme les lunettes DJI FPV.
- Coût souvent plus élevé que les VTX analogiques, tant pour l’émetteur que pour le récepteur.
- Poids souvent plus élevé que les VTX analogiques.
Les VTX numériques offrent généralement une meilleure qualité d’image et moins d’interférences, mais nécessitent un investissement plus important. Les VTX analogiques sont plus abordables et compatibles avec une plus grande variété de matériel, mais peuvent offrir une qualité d’image inférieure dans des environnements avec beaucoup d’interférences.
RX (Récepteur)
Récepteur monté sur le drone FPV pour capter les signaux envoyés par la radiocommande du pilote. Ces signaux incluent les commandes de pilotage telles que l’inclinaison, la rotation, l’accélération, et d’autres, permettant un contrôle précis et réactif du drone. Le RX décode ces signaux et les transmet au contrôleur de vol, qui les convertit en mouvements réels du drone.
Types de RX et protocoles de communication
RX PWM : ce type de RX utilise le signal PWM (Pulse With Modulation). Il est souvent utilisé dans les drones FPV plus anciens.
RX PPM : les RX PPM (Pulse Position Modulation) regroupent plusieurs signaux PWM en un seul signal, ce qui réduit le nombre de fils nécessaires pour la connexion entre le RX et le contrôleur de vol.
RX SBus : le protocole SBus est un protocole de communication numérique plus avancé qui offre une transmission plus rapide et plus précise des commandes de la radio commande vers le drone. Il est largement utilisé dans les drones FPV modernes.
RX Crossfire : le système Crossfire est une technologie de communication longue portée développée spécifiquement pour le FPV. Les RX Crossfire offrent une portée étendue et une faible latence, idéales pour les vols à grande distance et les environnements où les interférences sont courantes.
Lors du choix d’un RX, il est important de considérer des facteurs tels que la compatibilité avec la radio commande utilisée, le protocole de communication préféré, la portée de transmission, la latence et la facilité d’installation.
Les batteries LiPo (Lithium-Polymère) et Li-ion (Lithium-Ion) sont toutes deux des types de batteries rechargeables utilisées dans de nombreux appareils électroniques, y compris les drones FPV.
Les batteries LiPo sont couramment utilisées dans les drones FPV en raison de leur excellent rapport poids/puissance et de leur capacité à fournir un courant élevé, idéales pour des vols dynamiques. Elles sont composées de cellules LiPo assemblées pour créer des packs de différentes capacités. Les batteries Li-ion, quant à elles, sont privilégiées pour les drones longue portée, offrant une meilleure autonomie et stabilité au détriment de la performance maximale, ce qui les rend adaptées aux vols nécessitant plus de durée.
Caractéristiques des Batteries LiPo
- Plage de tension : entre 3.6V et 4.2V : lorsque la tension atteint 3.6V, la batterie est considérée comme faible, tandis qu’à 4.2V, elle est entièrement chargée.
- Taux de décharge élevé (150C) : les batteries LiPo sont capables de fournir un courant élevé pour les drones FPV nécessitant des pointes de puissance importantes.
- Léger et compact : les batteries LiPo offrent une excellente densité énergétique, ce qui signifie qu’elles fournissent beaucoup d’énergie pour leur poids.
- Cycle de vie : les batteries LiPo ont généralement un nombre de cycles de charge/décharge élevé, mais elles nécessitent une manipulation et un stockage appropriés pour éviter les risques de surchauffe ou d’endommagement.
Caractéristiques des Batteries Li-ion
- Plage de tension : entre 2.5V et 4.2V : lorsque la tension atteint 2.5V, la batterie est considérée comme faible, tandis qu’à 4.2V, elle est entièrement chargée.
- Capacité élevée : les batteries Li-ion ont une densité énergétique encore plus élevée que les LiPo, ce qui signifie qu’elles peuvent stocker plus d’énergie pour leur poids, offrant ainsi des temps de vol plus long.
- Stabilité et sécurité : les batteries Li-ion sont généralement considérées comme plus stables et moins sujettes aux risques d’incendie ou de surchauffe par rapport aux LiPo, ce qui les rend attrayantes pour les applications nécessitant une utilisation prolongée ou des environnements sensibles (froid hivernal).
- Taux de décharge inférieur : bien que les Li-ion offrent une capacité élevée, leur taux de décharge est inférieur à celui des LiPo. Donc moins de réactivité pour des drones nécessitant une puissance instantanée élevée.
Choix entre LiPo et Li-ion ?
Le choix entre les batteries LiPo et Li-ion dépend largement de l’application et des besoins du pilote. Pour les courses FPV et les vols freestyle qui nécessitent une puissance instantanée élevée, les batteries LiPo sont privilégiées en raison de leur capacité à fournir un courant élevé. En revanche, pour les vols longue portée, la photographie aérienne ou les missions nécessitant une autonomie prolongée, les batteries Li-ion peuvent être plus adaptées en raison de leur capacité énergétique supérieure.
Un condensateur (“condo”) est un composant électronique placé sur l’alimentation du drone, généralement entre la batterie et l’ESC, pour filtrer les pics de tension et réduire le bruit électrique.
Sa valeur s’exprime en :
- µF (microfarads) : capacité de filtrage,
- V (volts) : tension maximale supportée.
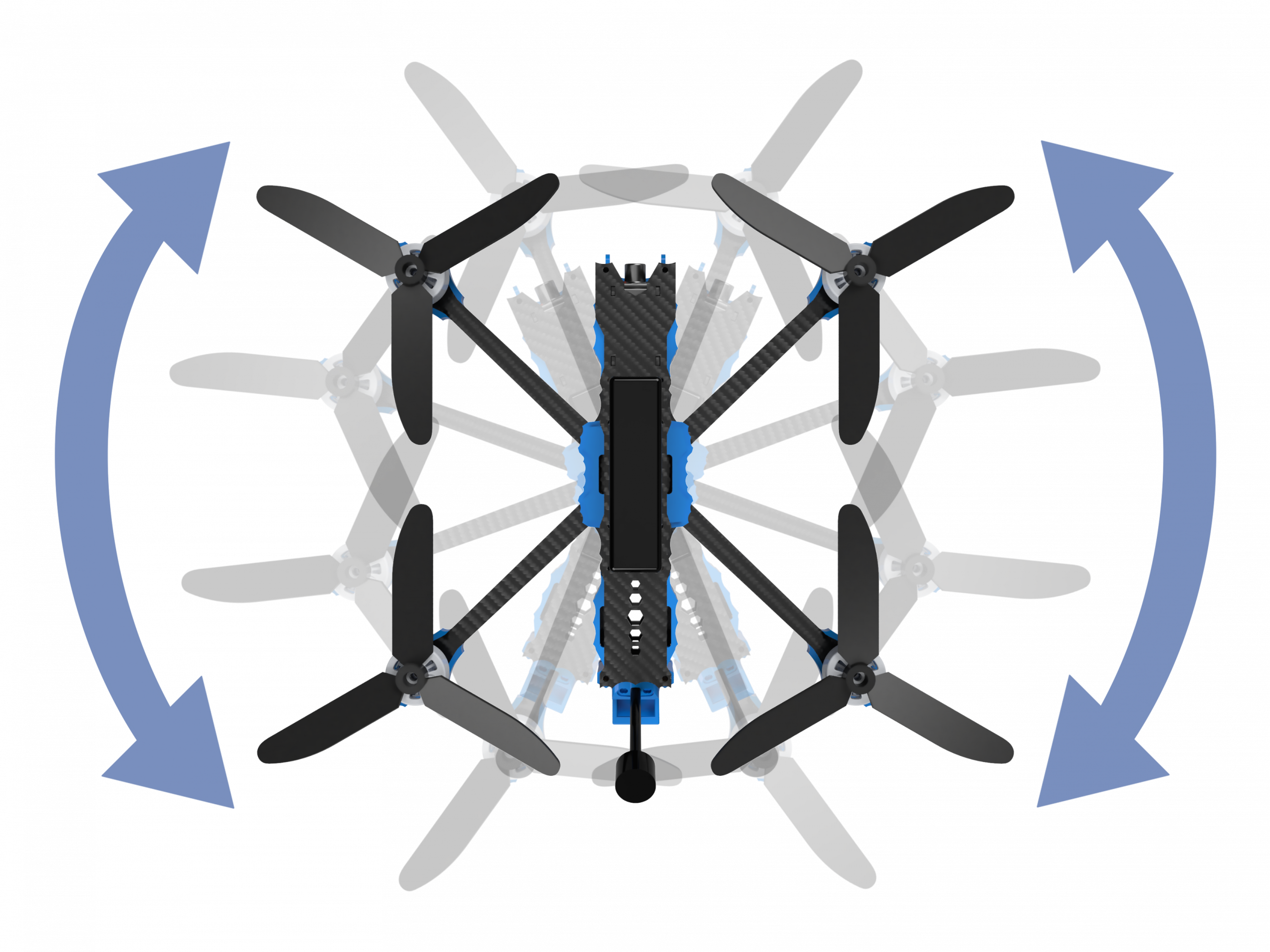
Montage des hélices
Sur un drone FPV, deux hélices tournent en sens horaire (CW — clockwise) et deux en sens antihoraire (CCW — counter-clockwise). C’est ce qui permet au drone de rester stable.
Dans Betaflight, tu as deux montages :
• Props in : les hélices avant tournent vers l’intérieur.
• Props out : les hélices avant tournent vers l’extérieur.
Une hélice a un sens précis. Tu ne peux pas la monter à l’envers.
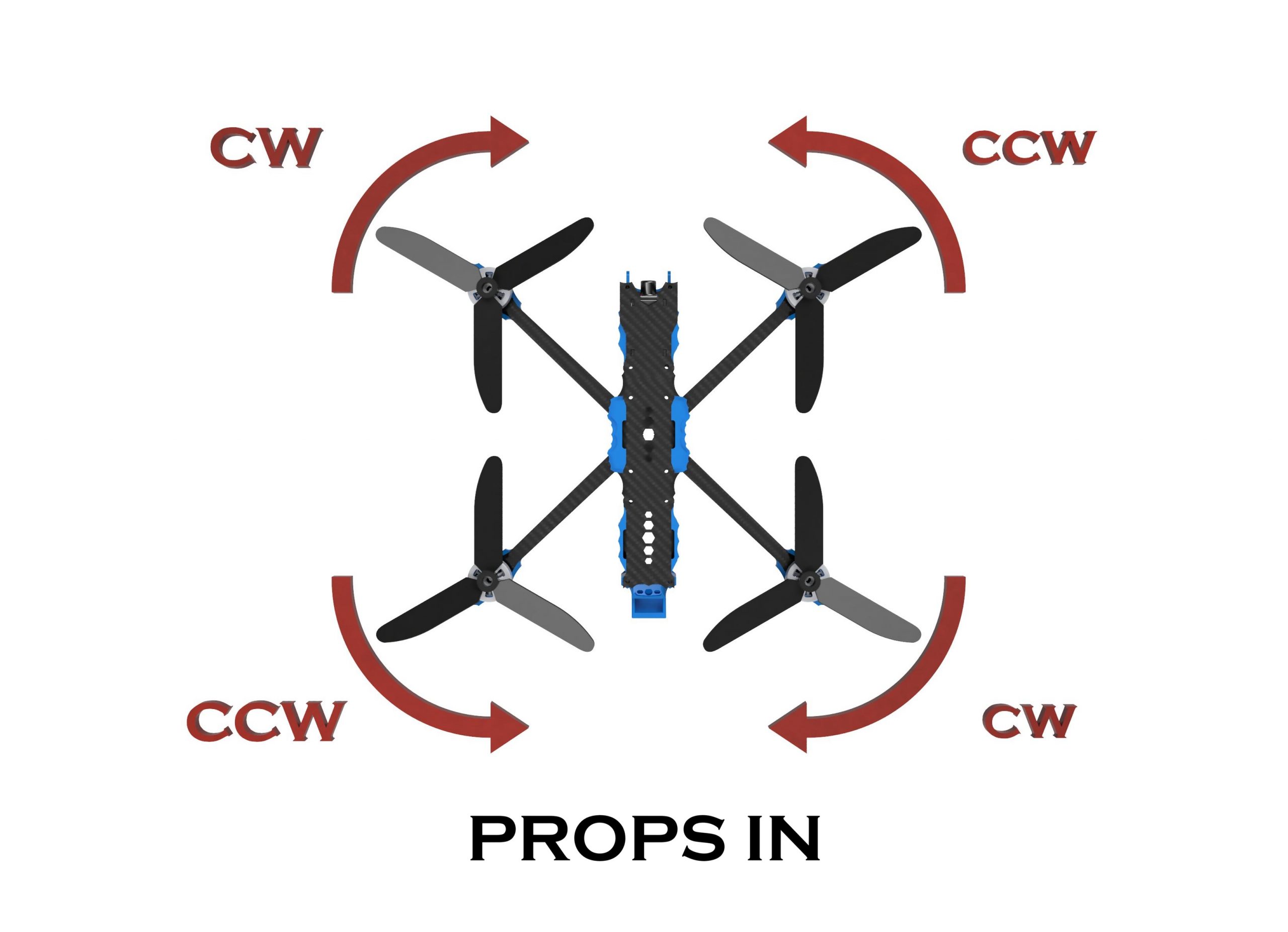

Avant de voler, vérifie que le sens des moteurs, les hélices (CW / CWW) et la config Betaflight sont bien cohérents. Si ça ne correspond pas, le drone se retournera directement au décollage.
Châssis 7 pouces pour la montagne
Pour voler en montagne, on utilise généralement un châssis 7 pouces. Ce type de châssis permet d’installer des hélices plus grandes, qui offrent deux avantages majeurs :
• Plus de poussée : le drone monte plus facilement, même en altitude.
• Meilleure autonomie : les grandes hélices consomment moins d’énergie pour maintenir le vol.
Le résultat est un vol plus stable, précis et confortable, même dans des conditions difficiles.
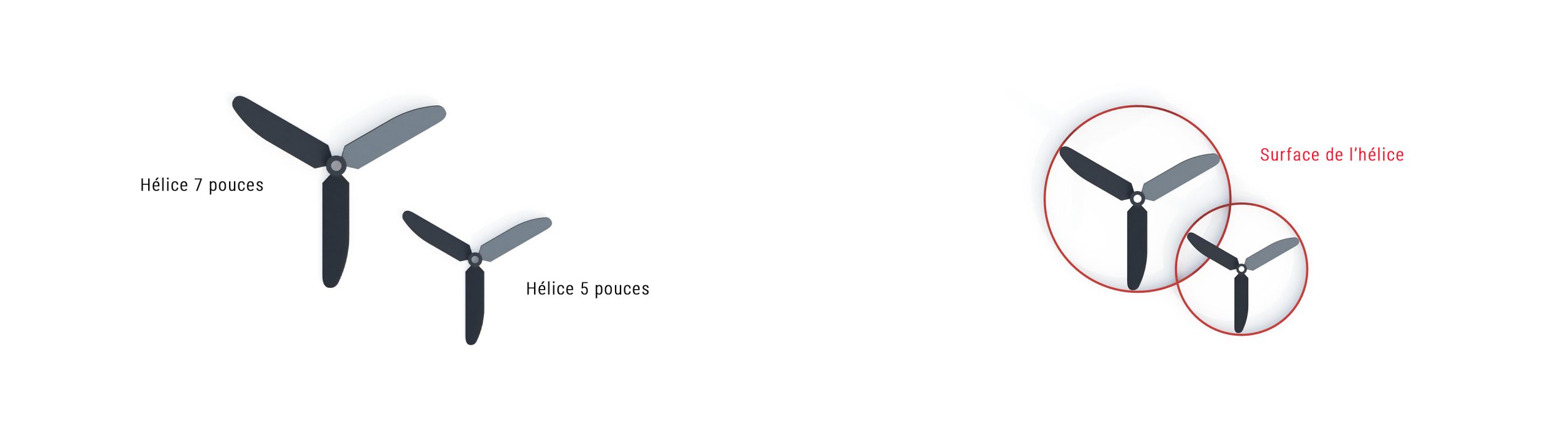
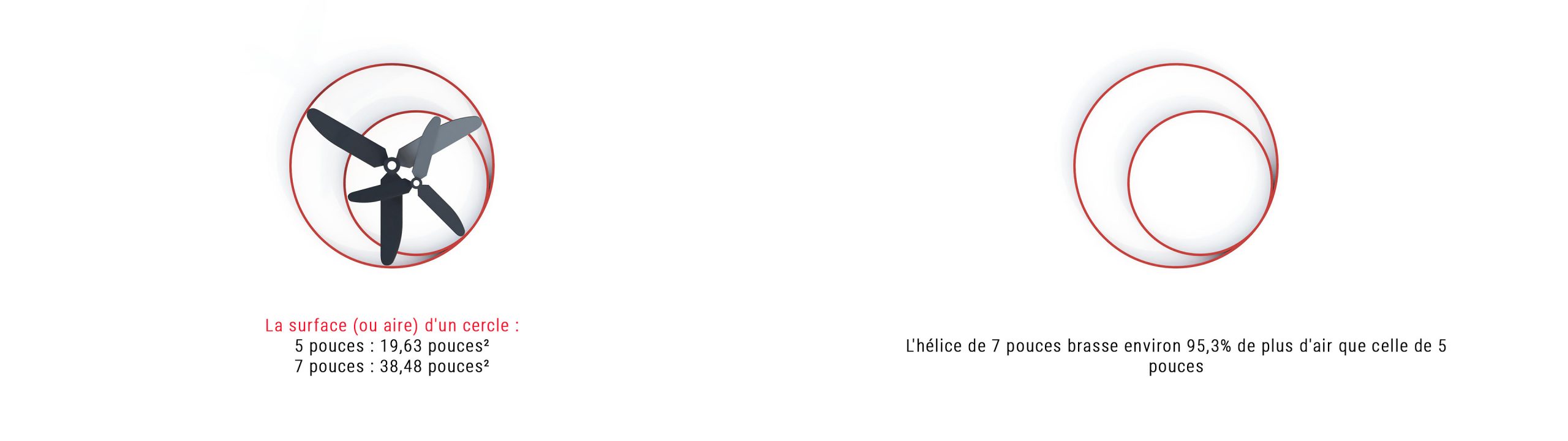
La surface d'air générée par une hélice 7 pouces permet de porter plus de poids, de voler plus loin avec la même énergie et de mieux résister au vent.
Choisir ses moteurs : KV et stator adaptés au long range
Un moteur brushless est un moteur électrique où des aimants fixés sur le rotor tournent autour de bobines fixes situées dans le stator.
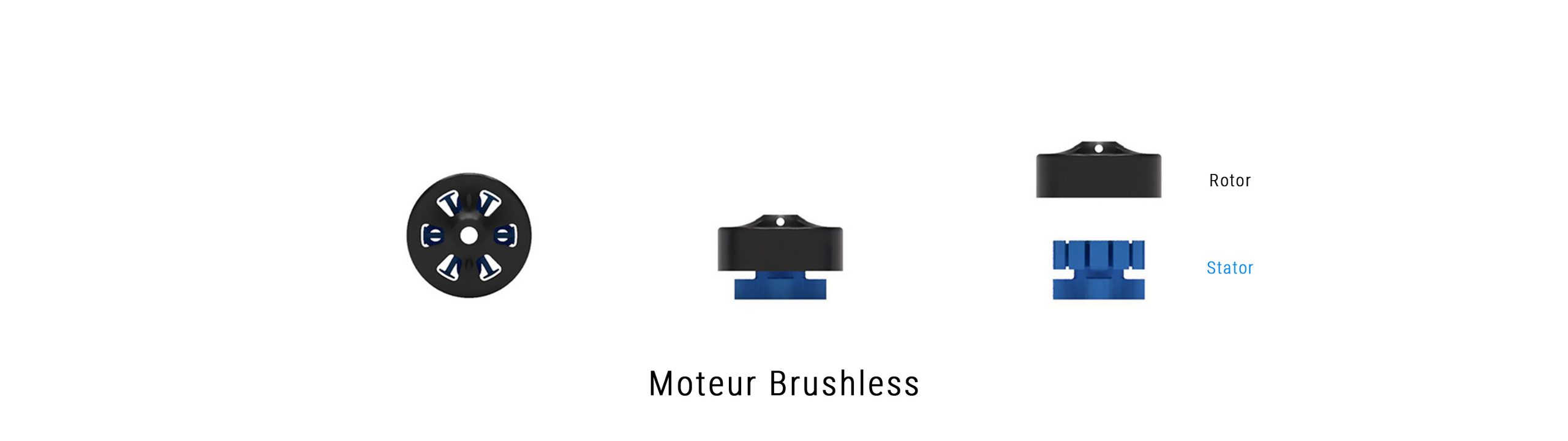
• Stator : la partie fixe du moteur. Un stator plus grand apporte plus de puissance mais consomme aussi plus d’énergie.
• Rotor : la partie mobile du moteur qui tourne avec les aimants et entraîne directement les hélices.
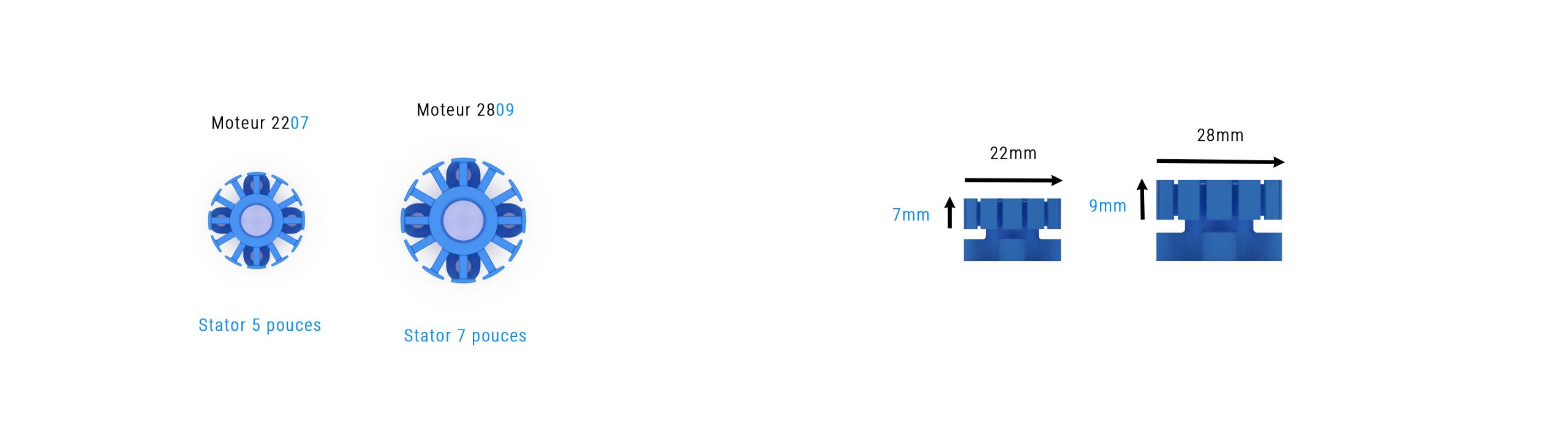
Le chiffre 2809 dans le nom d'un moteur FPV représente deux paramètres :
• 28 : le diamètre du moteur en millimètres (28 mm).
• 09 : la hauteur du moteur en millimètres (9 mm).
Pour voler longtemps, on utilise des moteurs à faible KV. Le KV indique la vitesse de rotation du moteur : plus il est élevé, plus le moteur tourne vite et consomme d’énergie. À l’inverse, un faible KV permet de tourner moins vite et donc de consommer moins.
Batteries : LiPo et Li-Ion
On utilise principalement deux types de batteries : les LiPo et les Li-Ion :
Les LiPo (Lithium-Polymère) sont conçues pour délivrer une puissance très élevée instantanément.
Les Li-Ion (Lithium-Ion) offrent une autonomie plus longue, mais avec une puissance de sortie plus limitée.
LiPo :
• Autonomie plus courte.
• Plus légères et compactes.
• Très forte capacité de décharge (puissance instantanée élevée).
• Moins durables dans le temps.
• Idéales pour les vols courts et intensifs.
Li-Ion :
• Autonomie plus longue.
• Plus lourdes et volumineuses.
• Capacité de décharge plus faible.
• Plus durables.
• Idéales pour les vols longs et le long range.
Système GPS : sécurité et orientation
Le GPS permet d'afficher des informations telles que la position, la vitesse et les satellites directement dans l'OSD du drone FPV.
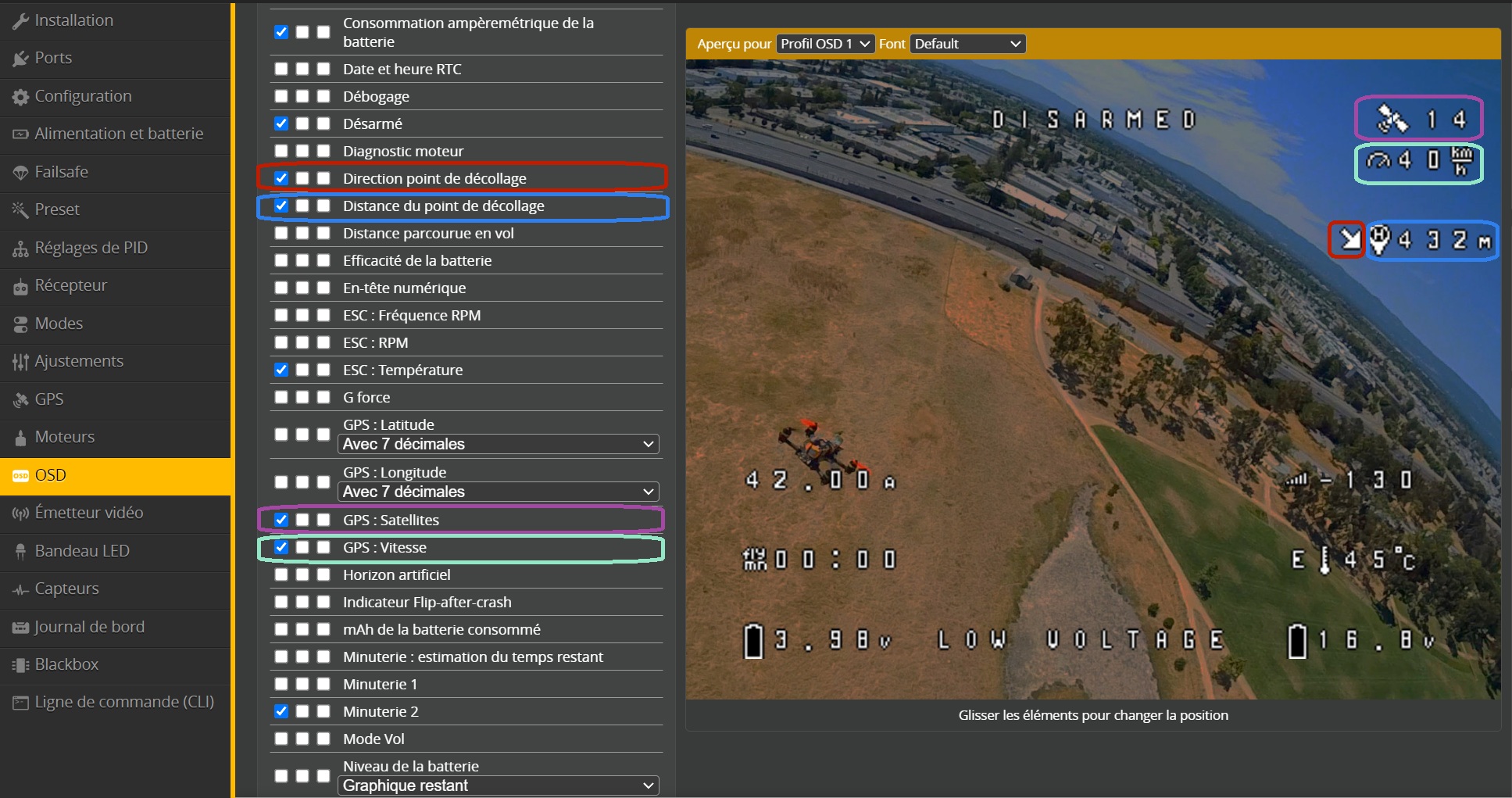
•  : nombre de satellites connectés au drone.
: nombre de satellites connectés au drone.
• 40 km/h : vitesse du drone.
• ⬊Ⓗ432m : la flèche et la distance par rapport au point de décollage vous aident à vous orienter et à ne pas vous perdre.
• RTH (Return to Home) : activable automatiquement en cas de failsafe ou manuellement via un switch, il permet au drone de revenir automatiquement à son point de départ en cas de perte de signal, de batterie faible, ou d'autres situations où le pilote ne peut plus contrôler le drone.
Transmission Vidéo et Radio (VTX et RX)
Il est important de savoir que le signal vidéo se perd plus fréquemment que le signal radio.
En général, les VTX émettent sur la fréquence de 5,8 GHz. Cette fréquence relativement élevée a une capacité de pénétration plus faible comparée à des fréquences plus basses, comme celle utilisée pour la radio à 2,4 GHz ou 0,9 GHz.
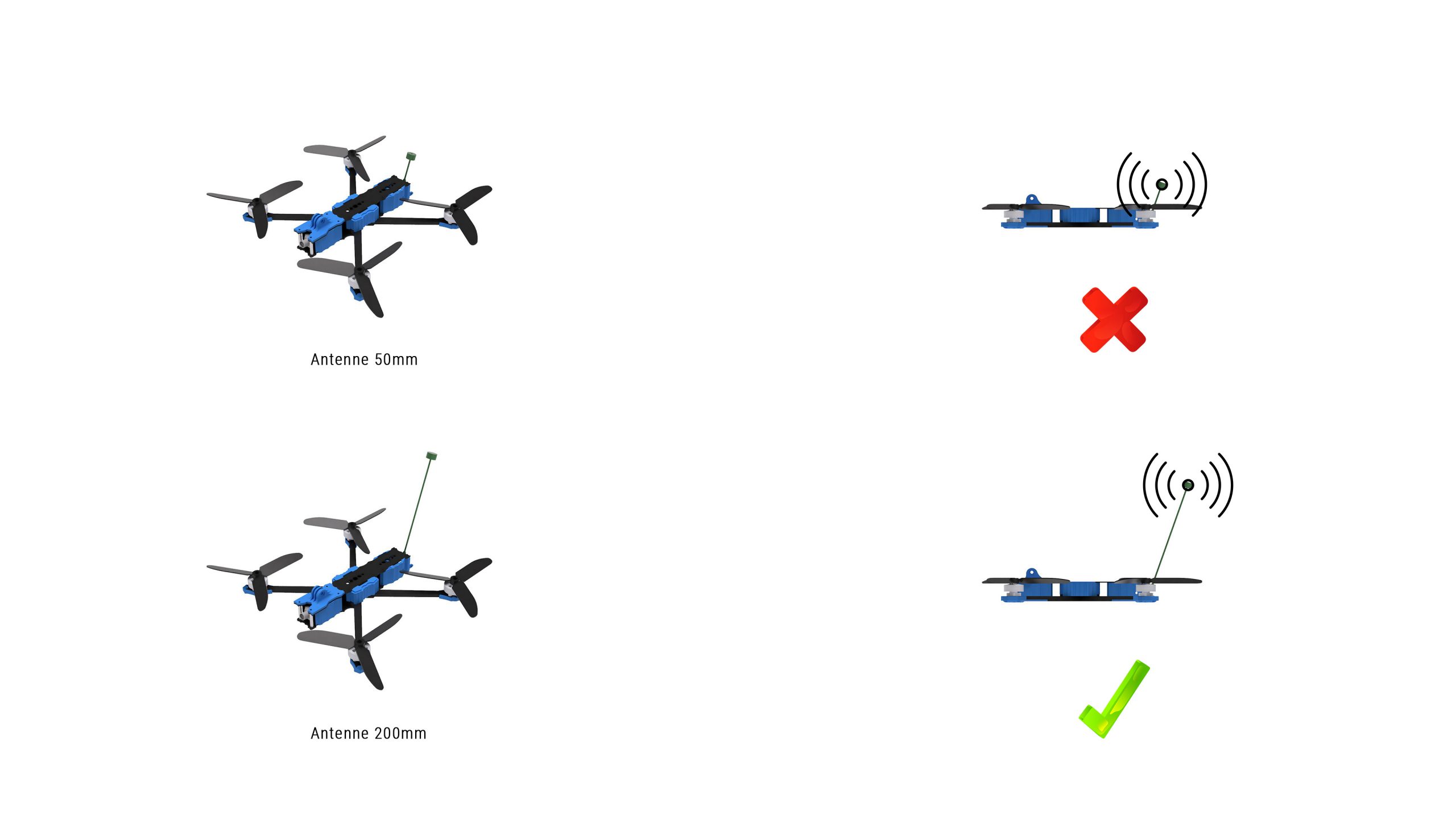
Utilisez un système de longue portée comme TBS Crossfire ou ExpressLRS, qui garantit une connexion stable sur des kilomètres. Les antennes TX et RX doivent être orientées dans la même direction. Par exemple, si l'antenne RX est positionnée verticalement sur votre drone, celle de votre radiocommande doit également l'être.

Eloignez le RX du VTX lors du montage d’un drone FPV améliore la stabilité du signal et réduit les interférences. Le VTX émet un signal vidéo puissant, souvent dans la bande de fréquence 5,8 GHz, qui peut générer des interférences électromagnétiques.
Analyse du terrain
Etudiez les reliefs pour évitez les zones mortes où les signaux radio et vidéo sont bloqués.
En montagne, les ondes radio et vidéo ne traversent pas facilement la roche. Une falaise ou un gros rocher entre vous et le drone peut casser la connexion.
• Pour se donner une idée pratique : ce que vos yeux voient depuis le point de décollage, c’est grosso modo l’espace où le signal passera correctement. Si une crête ou un rocher obstrue la ligne de vue, les lunettes FPV et la radiocommande risquent de perdre le contact avec le drone.
• Conseil pratique : avant le vol, repérez les zones dégagées et privilégiez les positions de décollage avec une ligne de vue directe vers le parcours prévu. Anticipez les obstacles pour réduire les risques de perte de signal.


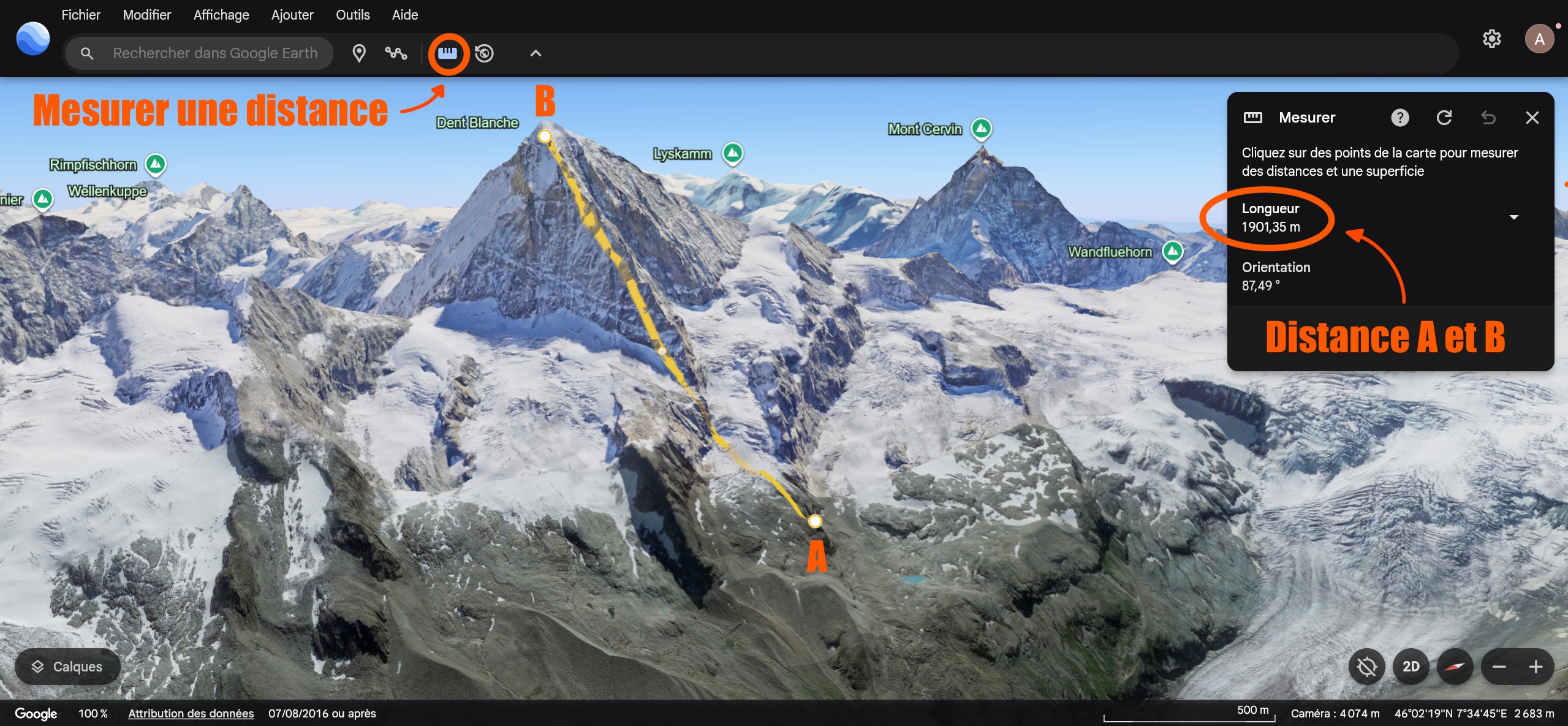
Planifiez vos vols avec soin : utilisez une carte topographique et des outils GPS pour visualiser le parcours. Mesurez la distance entre le point de décollage et votre objectif (point A → point B), par exemple sur Google Earth. Repérez la zone de décollage la plus dégagée pour garder une ligne de vue claire et sécurisée. Enfin, assurez-vous de ne déranger personne : randonneurs, parapentistes ou toute autre activité en montagne doivent pouvoir profiter de l’espace en toute sécurité.
Conditions alpines et méteo
Voler en milieu alpin demande une attention particulière aux conditions météo.
Le vent est souvent plus présent en montagne : il peut être fort, changeant et turbulent, surtout près des crêtes, des reliefs et dans les vallées. Il influence directement la stabilité du drone et nécessite un pilotage plus doux et anticipé.
L’altitude réduit la densité de l’air, ce qui diminue l’efficacité des hélices et des moteurs. Le drone manque alors de puissance et consomme davantage, d’où l’importance de prévoir une marge de batterie suffisante.
Le froid a un impact important sur les batteries et l’électronique. Les LiPo voient leurs performances chuter rapidement par basses températures. Les batteries Li-ion sont généralement mieux adaptées au froid, avec une tension plus stable, mais nécessitent elles aussi d’être protégées du gel. Il est conseillé de garder les batteries au chaud avant le vol, de réduire la durée des sessions et de surveiller attentivement la tension en vol.
Une bonne préparation et une approche prudente sont essentielles pour voler en montagne en toute sécurité.
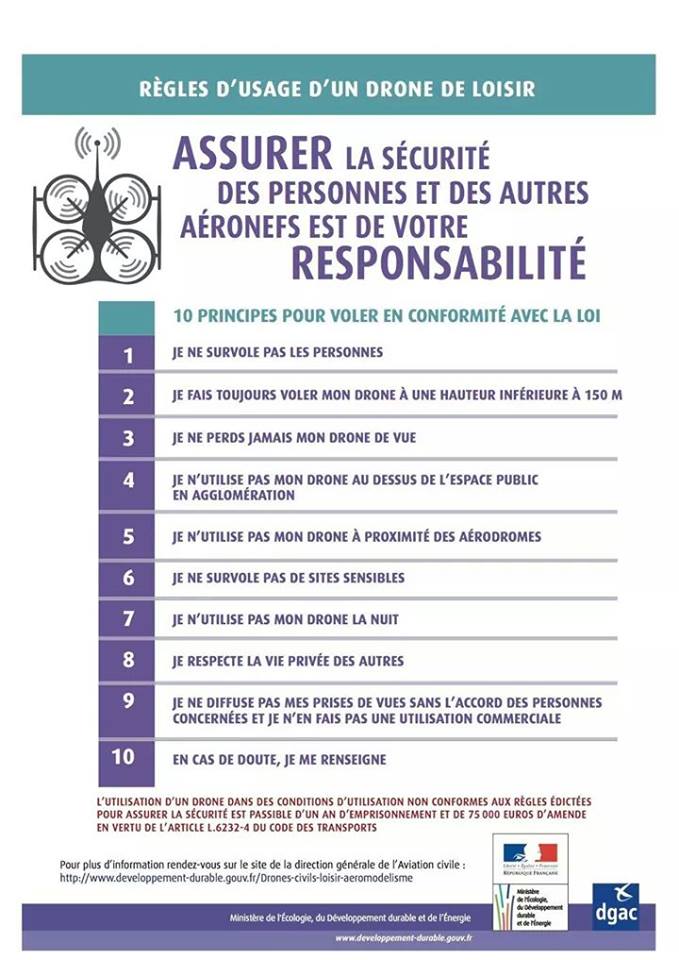
Sécurité et responsabilité
Le vol en montagne exige vigilance et prudence. Les règles concernant la distance et la puissance VTX peuvent varier selon les lieux, et dans certains endroits le vol FPV est interdit. Pilotez toujours de manière responsable : respectez la réglementation locale et évitez tout danger pour vous et pour les autres.
Avant chaque vol, inspectez votre drone et vos composants. Vérifiez que la connexion radio avec la radiocommande fonctionne parfaitement, que le signal VTX est correct, et que tout est prêt pour le terrain afin de voler en toute sécurité.
Configuration avancée : Betaflight
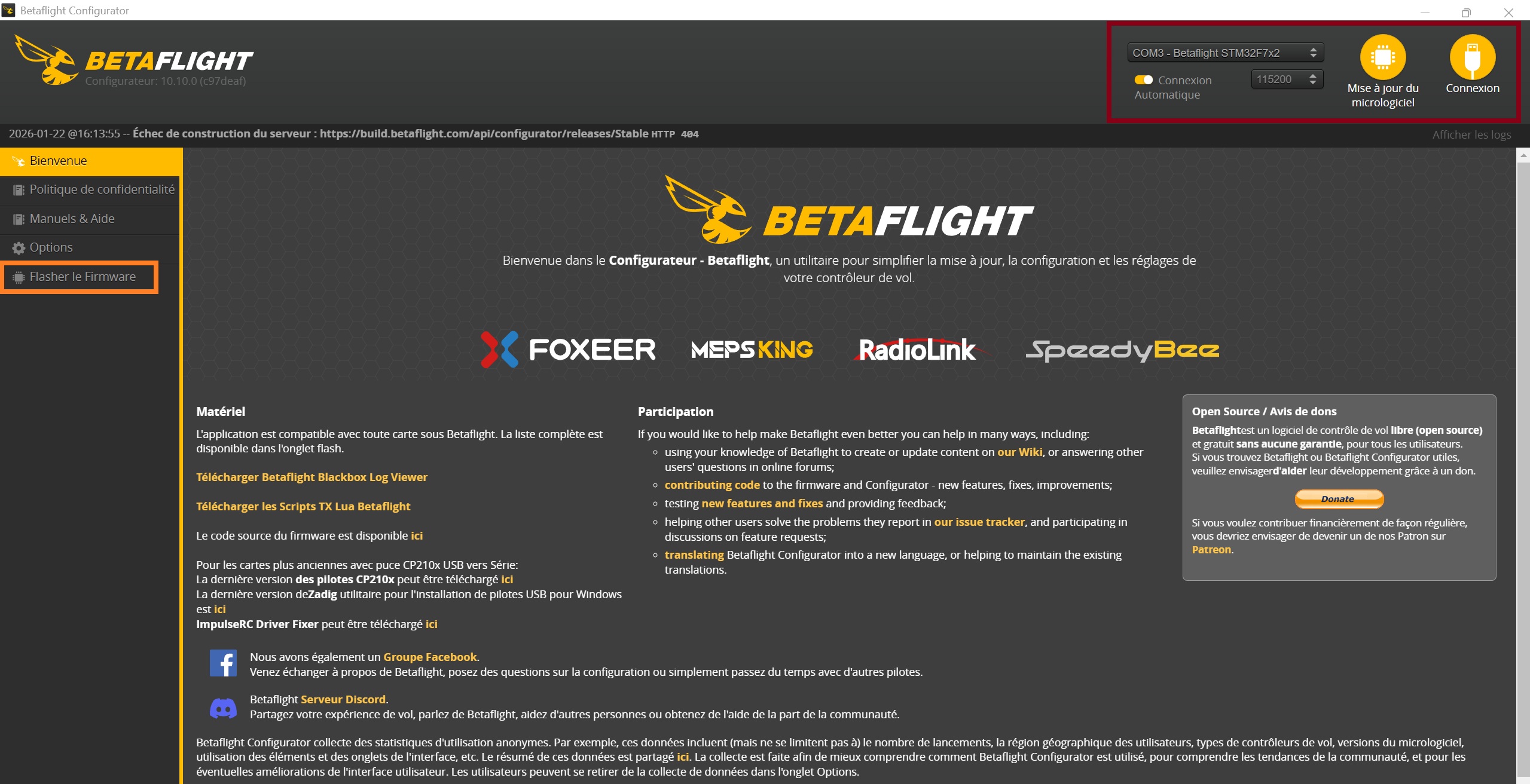
▙ Connexion à Betaflight ▜
Il n’est pas nécessaire de brancher une batterie pour se connecter à betaflight. On branche la batterie uniquement pour le GPS ou pour tester les moteurs (retirer les hélices avant).
Si votre ordinateur ne reconnaît pas le contrôleur de vol, vérifiez que vous utilisez bien un câble de données et non un câble de charge uniquement.
▙ Firmware ▜
Vous n’êtes pas obligé de mettre à jour le firmware immédiatement. Si le drone vole correctement et que vous débutez avec Betaflight, il est préférable d’attendre. Le flashage d’un nouveau firmware efface la configuration existante et donc impose une reconfiguration complète.
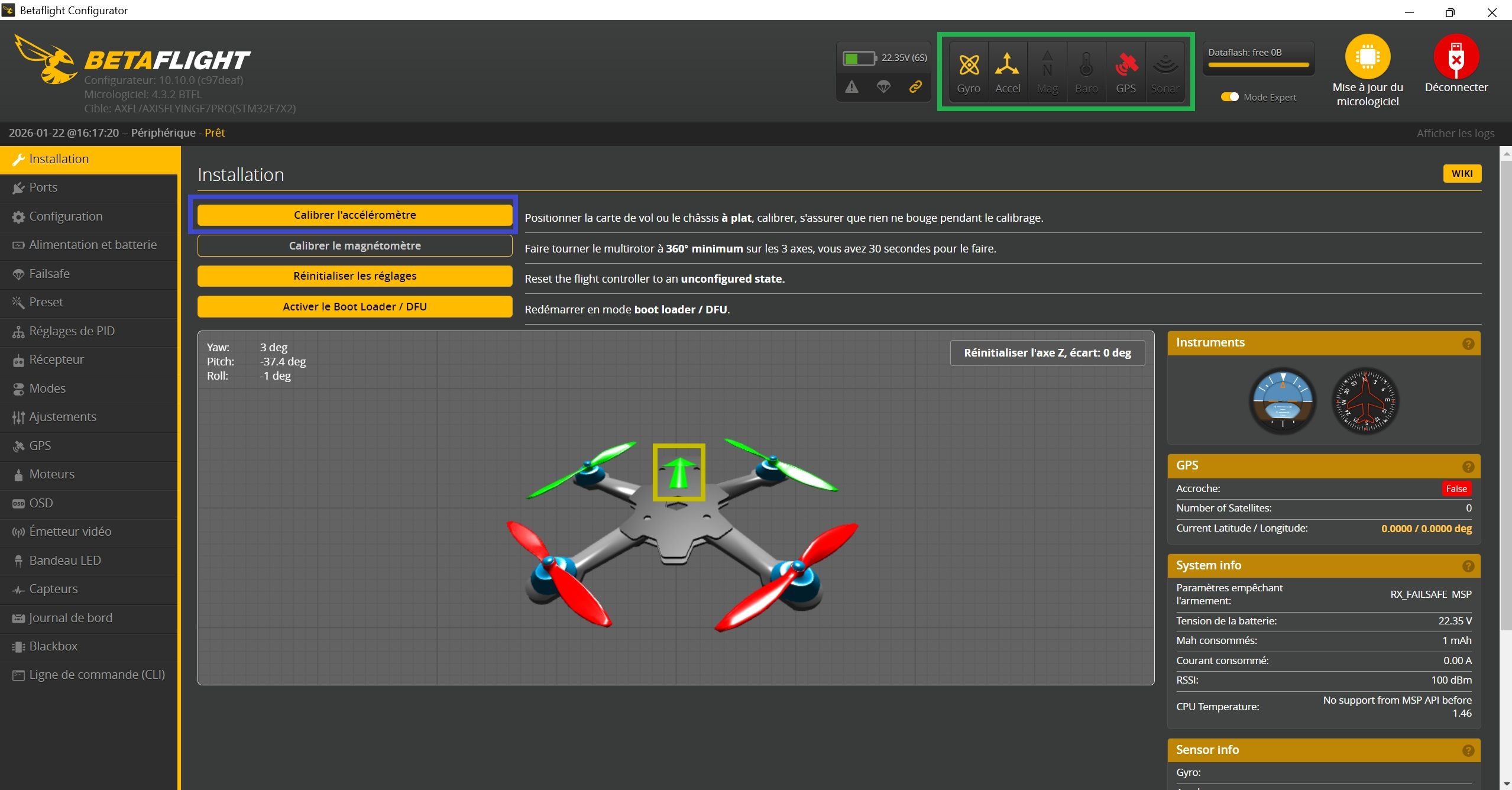
▙ Interface ▜
La barre supérieure affiche l’état des capteurs du contrôleur de vol. Les icônes allumées indiquent les capteurs actifs. Une icône GPS rouge signifie qu'elle n'a pas encore acquis de position satellite.
Si un message indique que l’accéléromètre n’est pas calibré, placez simplement le drone sur une surface plane et lancez la calibration (Calibrer l'accéléromètre).
▙ Vérification du gyroscope ▜
Dans l’onglet Installation, le modèle 3D doit reproduire exactement les mouvements du drone réel. Si ce n’est pas le cas, l’orientation ou la configuration du gyroscope est incorrecte. Cette vérification doit être effectuée avant tout test moteur.
▙ Orientation du contrôleur de vol ▜
Si le contrôleur de vol n’est pas monté dans l’orientation standard, son orientation doit être définie dans Betaflight. Une orientation incorrecte entraîne un comportement instable ou incontrôlable, même si le reste de la configuration est correct.
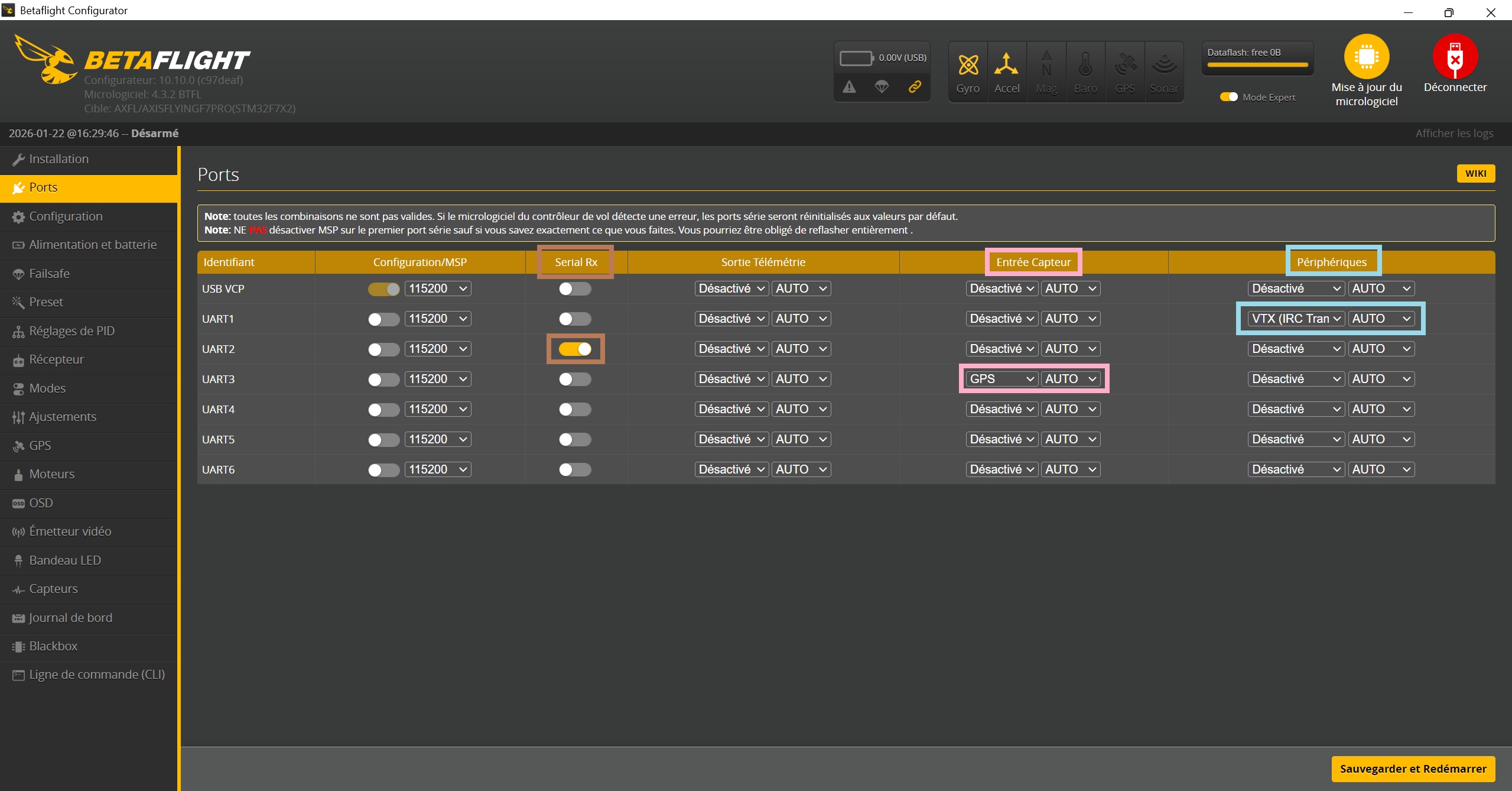
▙ Configuration du système radio ▜
Pour les récepteurs (Serial Rx) comme ExpressLRS ou Crossfire, activer Serial RX sur l'UART utilisé.
▙ Configuration du GPS ▜
Pour le GPS, activer dans l'entrée capteur sur l'UART correspondant et sélectionner AUTO.
▙ Configuration du système vidéo ▜
• DJI ou Walksnail : sélectionner VTX (MSP + DisplayPort) sur l'UART correspondant.
• Système analogique : sélectionner VTX (SmartAudio ou IRC Tramp) sur l'UART correspondant.

▙ Configuration générale ▜
L’accéléromètre peut rester activé. Le drone peut voler sans, mais certains modes de vol en dépendent comme le mode Angle, le mode Horizon et le sauvetage GPS.
Le baromètre et le magnétomètre doivent être activés uniquement si le contrôleur de vol les possède et si leur utilisation est prévue.
▙ L’angle d’armement ▜
L’angle d’armement empêche l’armement du drone lorsqu’il est trop incliné. La valeur par défaut de 25° limite les armements accidentels. Régler cet angle à 180° désactive cette protection et permet d’armer le drone quelle que soit son orientation.
▙ Configuration Beacon Dshot ▜
• Le mode RX-LOST permet aux moteurs de biper automatiquement après une perte de signal ou l’extinction de la radiocommande.
• Le mode RX-SET permet de déclencher le bip des moteurs via la radiocommande, sans avoir besoin d’un buzzer, à condition d’utiliser le protocole DSHOT et d’activer le BEEPER (onglet MODES).
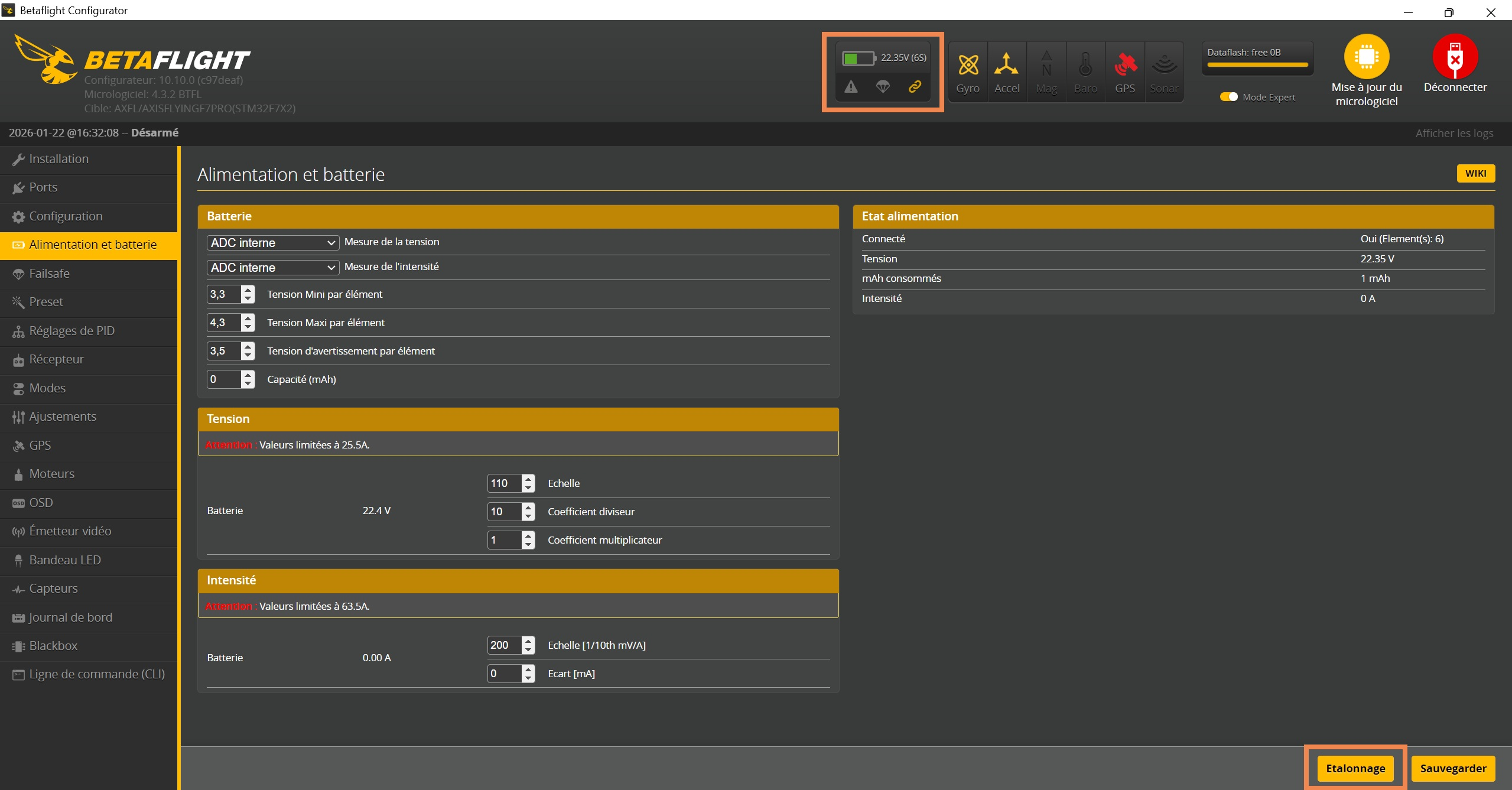
▙ Batterie ▜
Avant de voler, vérifiez que la tension affichée par Betaflight correspond à la tension réelle de la batterie.
Mesurez la tension avec un testeur, branchez la batterie au drone (hélices retirées), puis comparez avec la valeur affichée dans Betaflight.
En cas d’écart, calibrez le capteur de tension dans l’onglet Alimentation et batterie :
1. Accédez à l'onglet Alimentation et batterie.
2. Cliquez sur le bouton Étalonnage.
3. Saisissez la tension mesurée dans la fenêtre, puis cliquez sur Calibrer.
Appliquez la nouvelle échelle de tension.
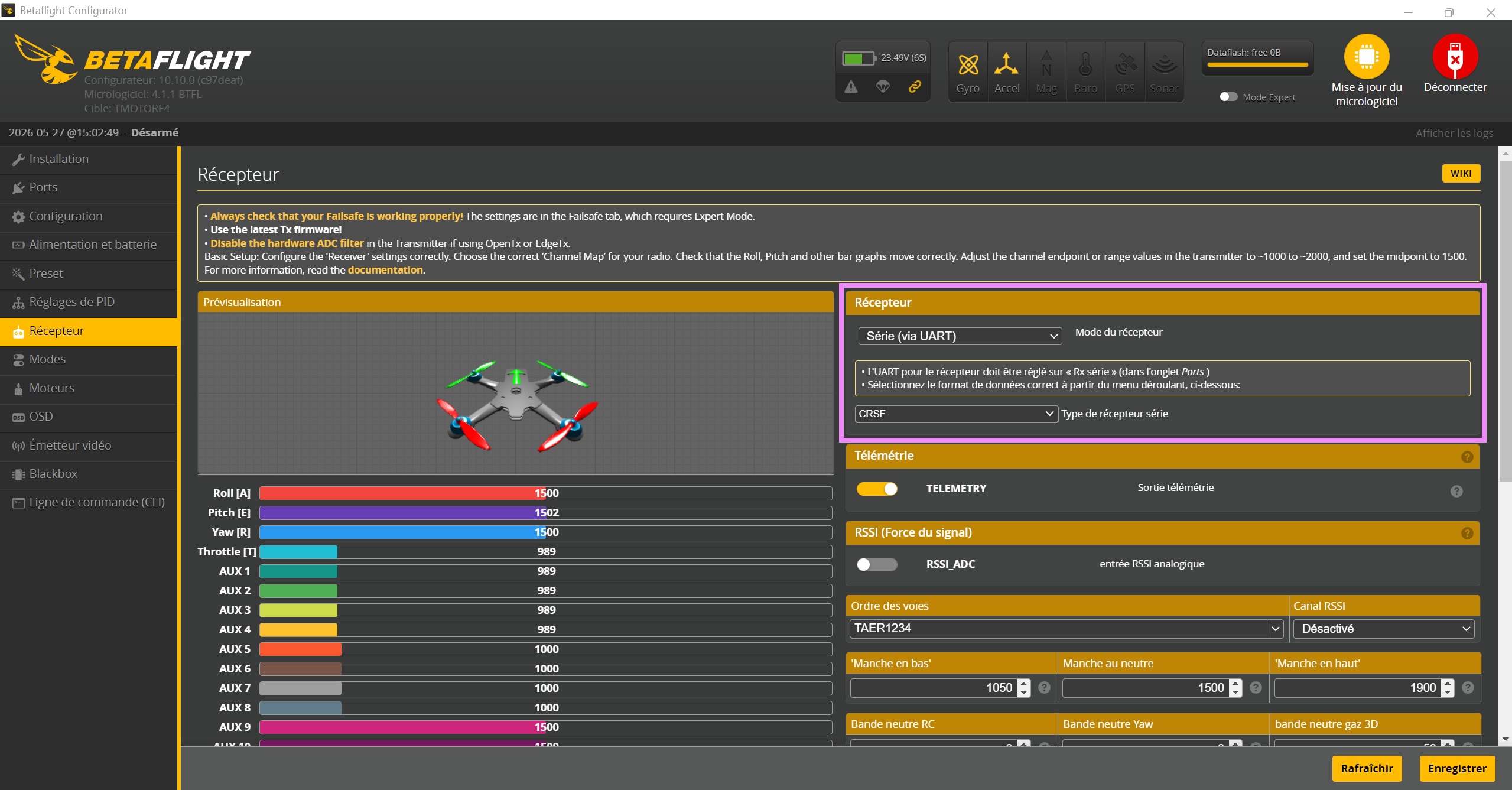
▙ Récepteur ▜
Si les sticks ne réagissent pas dans Betaflight, vérifier si :
1. Le récepteur est correctement bindé.
2. Connecté au bon UART (TX/RX).
3. La réception série (Serial RX) pour le port UART approprié dans l'onglet Ports.
4. Avez-vous sélectionné le protocole RX correct (CRSF pour ExpressLRS/Crossfire) ?
Tant que cette communication n’est pas fonctionnelle, le drone ne peut pas répondre.
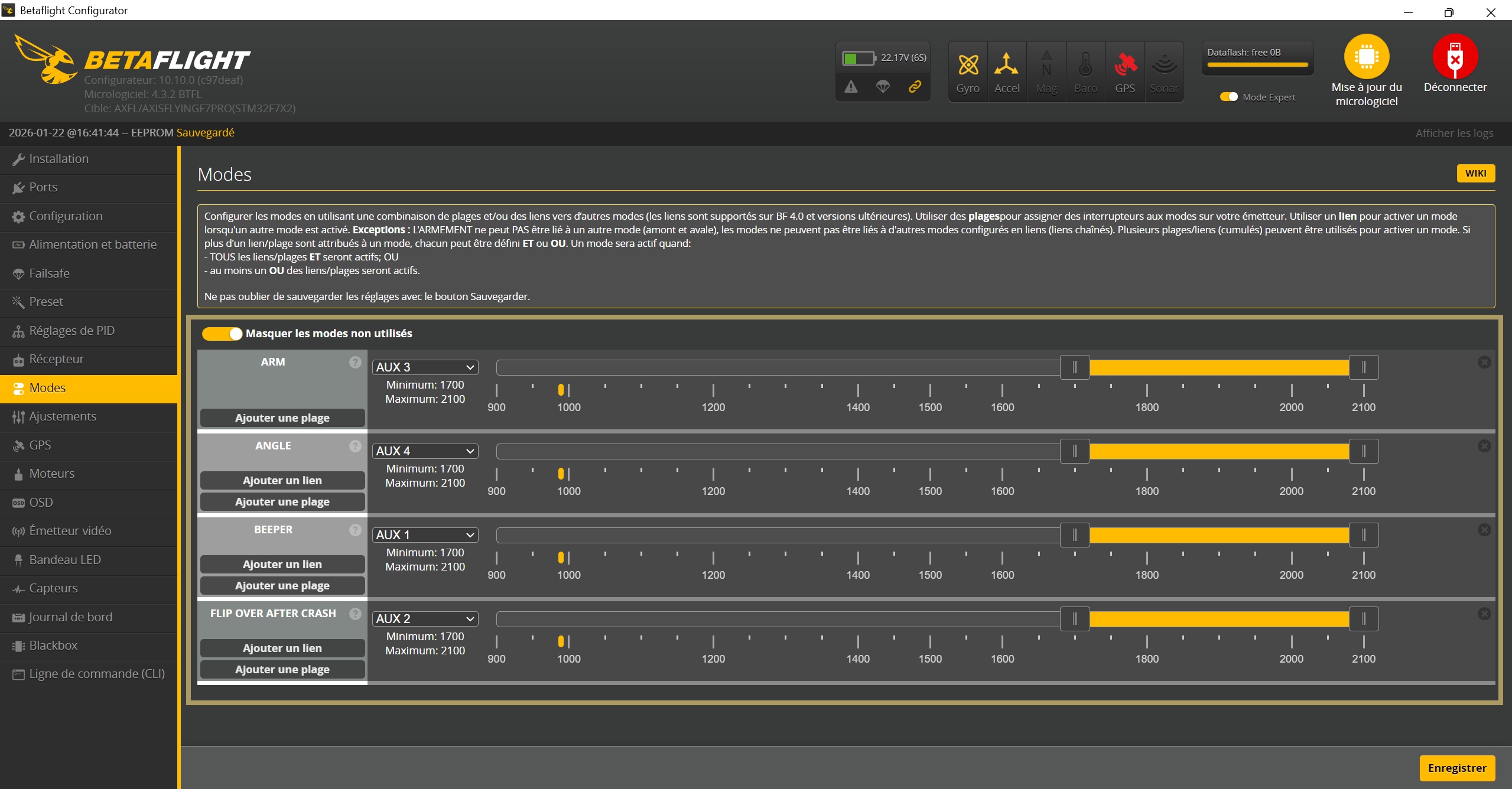
▙ Modes ▜
L’onglet Modes permet d’assigner des interrupteurs radio aux fonctions essentielles :
1. ARM : active ou désactive les moteurs du drone.
2. ANGLE : mode stabilisé, le drone se remet à plat tout seul.
3. BEEPER : fait sonner le drone pour le retrouver facilement.
4. FLIP OVER AFTER CRASH : permet de retourner le drone s’il est à l’envers après un crash.
Il est préférable de rester sur une configuration simple.
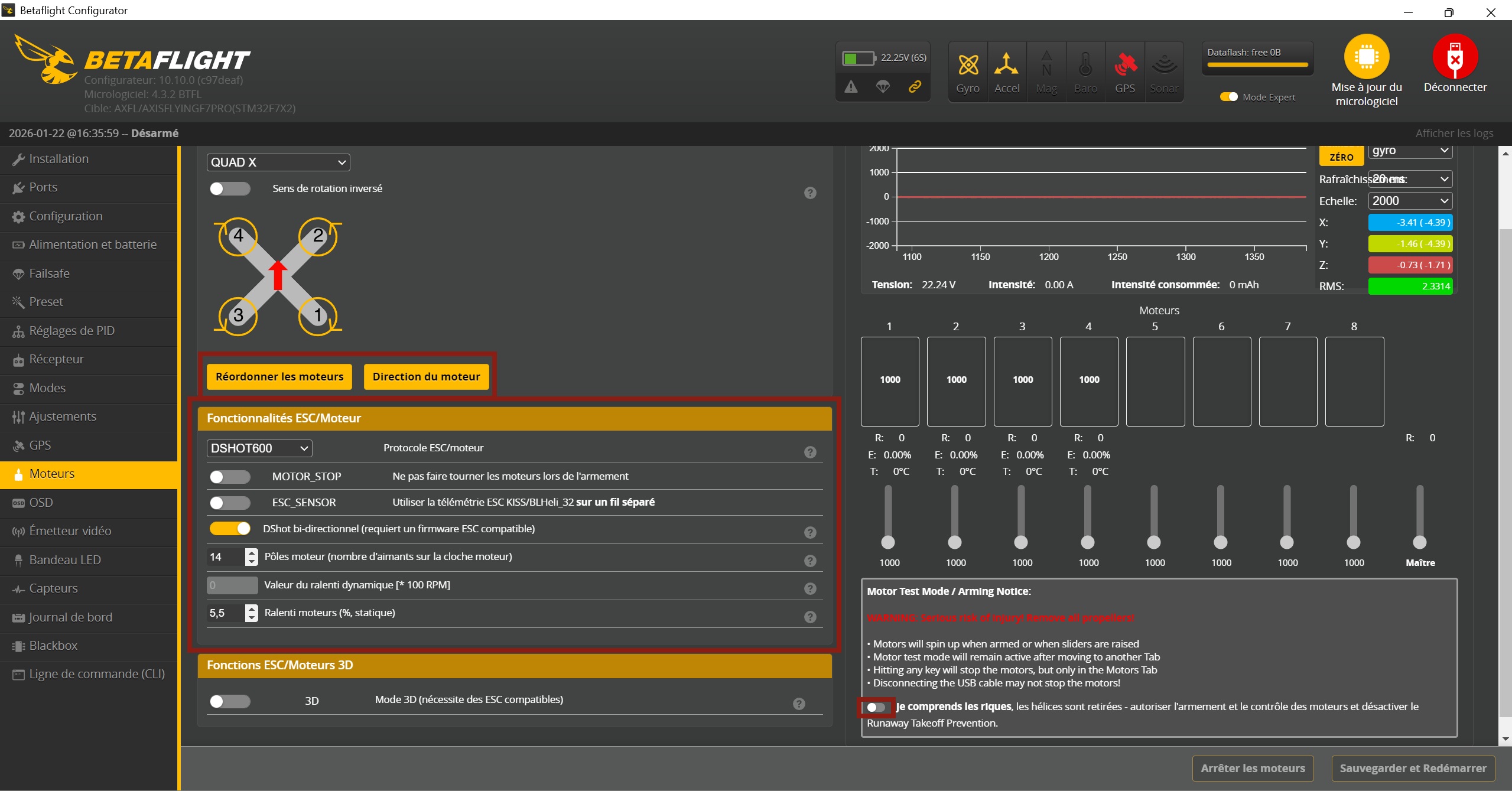
▙ Moteurs ▜
Avant tout test moteur, retirez impérativement les hélices. Vérifiez que chaque moteur tourne correctement, qu’il correspond au bon numéro et qu’il tourne dans le bon sens. Betaflight permet de corriger l’ordre et le sens de rotation sans modification matérielle.
Si l'ordre des moteurs est incorrect, cliquez sur « Direction des moteurs ».
Si certains moteurs tournent dans le mauvais sens, cliquez sur « Sens de rotation des moteurs » pour les inverser.
▙ Protocole ESC ▜
Pour tout ESC moderne, le protocole DShot est recommandé. il offre plusieurs avantages :
1. Pas besoin d’étalonner l’ESC.
2. En assignant la bonne touche, les moteurs font office de buzzers, ce qui peut s'avérer utile pour localiser votre drone après un crash.
3. Pour utiliser la télémétrie ESC, DShot est requis.
Sécurité avant le premier vol
Avant le premier décollage, testez le failsafe. Hélices retirées, armez le drone, puis éteignez la radio. Les moteurs doivent s’arrêter automatiquement en cas de perte de signal.
PID (Proportionnelle, Dérivée, Intégrale)
L’onglet PID permet d’affiner le comportement de vol, mais aucune modification n’est nécessaire pour les premiers vols. Les valeurs par défaut de Betaflight conviennent à la majorité des configurations.
Configuration avancée : BLHeli
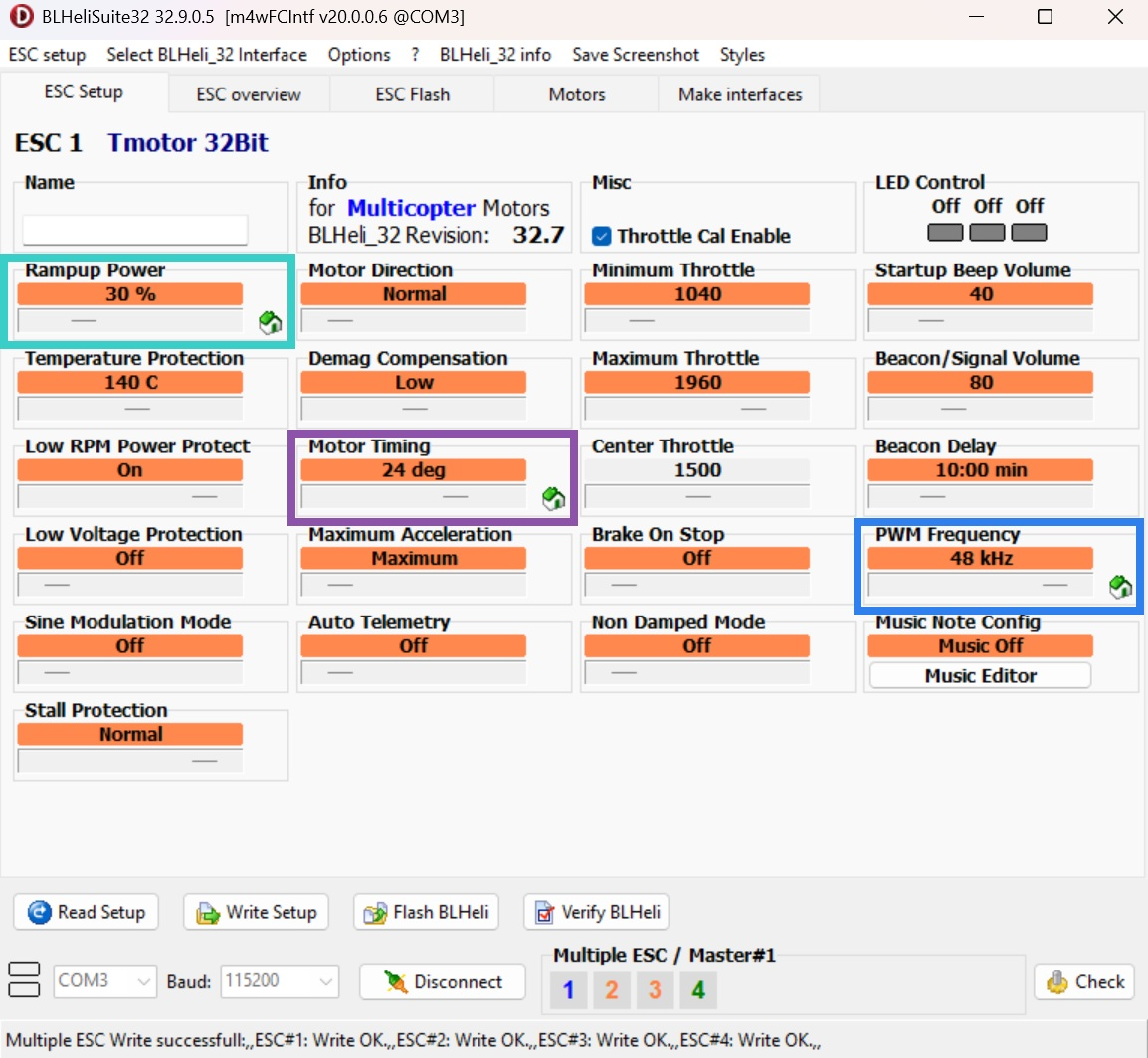
▙ Rampup Power ▜
La rampup power règle la vitesse à laquelle l’ESC augmente la puissance du moteur quand tu mets les gaz. Elle permet d’éviter les à-coups, de réduire les pics de courant et de protéger le matériel. En général, une valeur entre 20 et 30 % convient à la plupart des montages : trop bas, les moteurs peuvent mal démarrer ; trop haut, ils chauffent davantage.
▙ Calage moteur (Motor Timing) ▜
Il est réglable de 1° à 31°, avec un mode automatique. Un calage de 16° favorise l’efficacité et l’autonomie. Un calage de 24° privilégie la puissance et convient mieux au freestyle et la course. Des valeurs plus élevées n’apportent pas de bénéfice notable.
▙ Fréquence PWM ▜